
Open-Source Designs for Distributed Manufacturing of Low-Cost Customized Walkers


| Type | |
|---|---|
| Authors | |
| Location | London, ON |
| Status | Designed Modelled Prototyped Verified |
| Verified by | FAST |
| Years | |
| Uses | 3D Printing |
| Links | https://doi.org/10.3390/inventions8030079 |
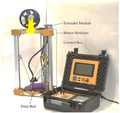
To improve accessibility, this article describes a static, four-legged walker that can be constructed from materials and fasteners commonly available from hardware stores coupled by open-source 3D-printed joints. The designs are described in detail, shared under an open-source license, and fabricated with a low-cost open-source desktop 3D printer and hand tools. The resulting device is loaded to failure to determine the maximum load that the design can safely support in both vertical and horizontal failure modes. The experimental results showed that the average vertical failure load capacity was 3680 ± 694.3 N, equivalent to 375.3 ± 70.8 kg of applied weight with the fractured location at the wood dowel handlebars. The average horizontal load capacity was 315.6 ± 49.4 N, equivalent to 32.2 ± 5.1 kg. The maximum weight capacity of a user of 187.1 ± 29.3 kg was obtained, which indicates that the open-source walker design can withstand the weight requirements of all genders with a 95% confidence interval that includes a safety factor of 1.8 when considering the lowest deviation weight capacity. The design has a cost at the bottom of the range of commercial walkers and reduces the mass compared to a commercial walker by 0.5 kg (19% reduction). It can be concluded that this open-source walker design can aid accessibility in low-resource settings.
Source code: https://osf.io/v3njw/ Onshape: https://cad.onshape.com/documents/f76431cccbb43ef79b0eb32f/w/2534bbc3536ada6a0d339e1a/e/2bbe74a159750ce6bb874837?renderMode=0&uiState=6424734000dc3b67df226d38
Derivative (fully 3D printable) : https://www.thingiverse.com/thing:6492490



Keywords
[edit | edit source]mobility, mobility aid, adaptive aid, walker, 3D printing, additive manufacturing, mechanical testing, open hardware, open-source hardware, frugal innovation
In the News
[edit | edit source]
- New 3D-printed, open-source walker breaks borders for life-long mobility Western News
- New 3D-printed, open-source walker allows people to manufacture their own customizable mobility device Medical Express
- Need a walker? These Western University engineers have made it easier, cheaper to build your own CBC
- Low-cost 4-legged walker designed by Western engineers CBC (video)
- CBC radio (CBC 93.5 FM (CBCL))
- CBC radio (CBC 93.5 FM (CBCL))II
- Open Source Everything: 3D Print Your Own Assistive Device 3D Print.com
- Open Source Walking Aid from 3D Printer 3Printr
- Open Source Gehhilfe aus dem 3D-Drucker 3DRuck
- Open Source Everything: Assist in Everything with 3D Printing 3DPrint.com
- Frugal innovation The Globe and Mail
See also
[edit | edit source]Open Source Devices






































Health Policy










- Emergence of Home Manufacturing in the Developed World: Return on Investment for Open-Source 3-D Printers
- Life-cycle economic analysis of distributed manufacturing with open-source 3-D printers
- Quantifying the Value of Open Source Hardware Development
| Authors | Joshua M. Pearce |
|---|---|
| License | CC-BY-SA-4.0 |
| Organizations | Free Appropriate Sustainable Technology, Western, Corporación Universitaria Minuto de Dios-UNIMINUTO |
| Cite as | Joshua M. Pearce (2023–2026). "Open-Source Designs for Distributed Manufacturing of Low-Cost Customized Walkers". Appropedia. Retrieved July 30, 2026. |