
3D printed magnetic soft magnetic helical coil actuators of iron oxide embedded polydimethylsiloxane

| Type | |
|---|---|
| Authors | Rasoul Bayaniahangar Shahab Bayani Ahangar Zhongtian Zhang Bruce P.Lee Joshua M. Pearce |
| Location | Michigan, USA |
| Status | Designed Modelled Prototyped Verified |
| Verified by | MOST |
| Years | |
| Links | https://www.academia.edu/44075069/3_D_Printed_Magnetic_Soft_Magnetic_Helical_Coil_Actuators_of_Iron_Oxide_Embedded_Polydimethylsiloxane https://www.sciencedirect.com/science/article/abs/pii/S092540052031128X |
| Hardware license | CERN-OHL-S |
|---|---|
| Certifications | Start OSHWA certification |


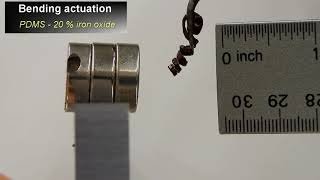
Soft actuators have grown to be a topic of great scientific interest. As the fabrication of soft actuators with conventional microfabrication methods are tedious, expensive, and time consuming, employment of 3-D printing fabrication methods appears promising as they can simplify fabrication and reduce the production cost. Complex structures can be fabricated with 3-D printing such as helical coils that can achieve actuation performances, which otherwise would be impossible with simpler geometries. In this study, development of soft magnetic helical coil actuators of iron oxide embedded polydimethylsiloxane (PDMS) was achieved with embedded 3-D printing techniques. Composites with three different weight ratios of 10 %, 20 %, and 30 % iron nanoparticles to PDMS were formulated. Using iron nanoparticles with the size of 15−20 nm helps preserve viscosity of the printing material low enough to print it with a small-bore needle (30-gauge, 180 micrometers inner diameter). The hydrogel support of Pluronic f-127 bath and the ability to maintain the ratio of the printed fiber's diameter to coil diameter about 0.25 resulted in the successful fabrication and release of fabricated helical coil structures. This enabled 3-D printed structures characterized as magnetic actuators to achieve linear and bending actuation of more than 300 % and 80° respectively in the case of composites with 30 % iron oxide nanoparticles. Moreover, it was shown that the 3-D printed helical coils with 10 % iron oxide nanoparticles can be utilized as untethered soft robots capable of locomotion on 45 and 90 degrees inclines under an applied magnetic field.



Highlights
[edit | edit source]- Soft magnetic helical coil actuators of iron oxide embedded polydimethylsiloxane.
- Composites with weight ratios of 10 %, 20 %, and 30 % iron nanoparticles to PDMS were formulated.
- Magnetic actuators to achieve linear of more than 300 % and bending actuation of 80°.
- 3-D printed helical coils with 10 % iron oxide = untethered soft robots climbed 90 degree inclines.
See also
[edit | edit source]- Ystruder: open source multifunction extruder with sensing and monitoring capabilities
- Mechanical Properties of Ultraviolet-Assisted Paste Extrusion and Postextrusion Ultraviolet-Curing of Three-Dimensional Printed Biocomposites
- Mechanical Properties of Components Fabricated with Open-Source 3-D Printers Under Realistic Environmental Conditions
| Authors | |
|---|---|
| License | CC-BY-SA-4.0 |
| Organizations | MTU, MOST |
| Cite as | J.M.Pearce (2020–2026). "3D printed magnetic soft magnetic helical coil actuators of iron oxide embedded polydimethylsiloxane". Appropedia. Retrieved July 11, 2026. |