▼This page is an automatic translation to Italian of Recyclebot v4.0dc.This translation is distributed in the hope that it will be useful, but without any guarantee of accuracy.
Questa pagina descrive l'estrusore di filamenti alimentato a corrente continua progettato da MOST.
Si noti che la calibrazione (descritta di seguito) richiede un sistema GNU/Linux e una conoscenza ragionevolmente avanzata di hardware e software. In particolare, è necessario sapere come modificare un programma, come compilare un programma per un microcontrollore AVR autonomo e come caricare tale programma sul microcontrollore. Questa pagina spiega brevemente come fare queste cose, ma le spiegazioni non sono rivolte ai principianti.
Due terminali a vite, passo 0,2" (3 - P8, P10, P13)
Alimentazione DC-DC, 7-28 V (1, PSU1)
Connettore a spina 2x3 passo 0,1" (2 - P14, P15)
Connettore pin passo 0,1" schermato 2x3 (1 - P12)
1x2 connettori a pin passo 0,1" (6)
1x3 connettori a pin passo 0,1" (2)
1x4 connettori a perno passo 0,1" (3)
OPZIONALE 1 pin per l'accesso ai pin ATMega 11, 19 e 26
Assemblea
La scheda di controllo richiede una saldatura attenta. Idealmente, si dovrebbe usare un forno a riflusso (si può usare anche un tostapane se si presta la dovuta attenzione). Poiché molti componenti sono a montaggio superficiale, la saldatura manuale è impegnativa. Quanto segue presuppone che la saldatura verrà rifluita.
Imposta la tensione di uscita dell'alimentatore DC-DC a 5 V. Questo DEVE essere fatto prima di saldare l'alimentatore DC-DC alla scheda di controllo. Tentare di impostare la tensione dopo averla saldata in posizione distruggerà l'ATMega AVR.
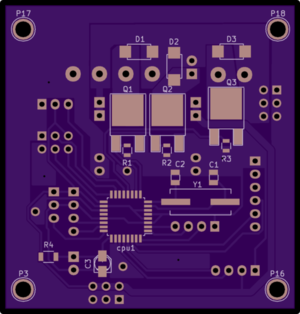
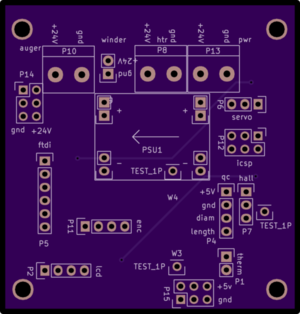
Parte anteriore del pannello di controlloRetro del pannello di controlloSi noti che i componenti verranno saldati sia sul retro che sulla parte anteriore della scheda.
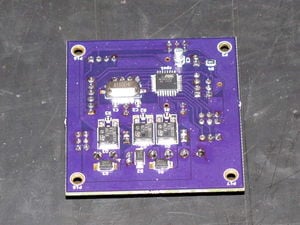
Parte anteriore con componenti SMD saldati in posizione.Riempire tutti i componenti SMD sulla parte anteriore della scheda con pasta saldante e rifondere la saldatura.
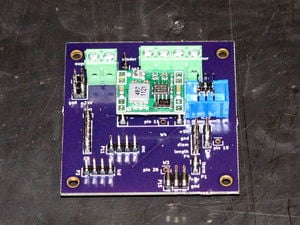
Torna con i componenti popolati.Riempire il retro della scheda con componenti passanti.
Compilare e flashare il firmware del controller ( qui ).
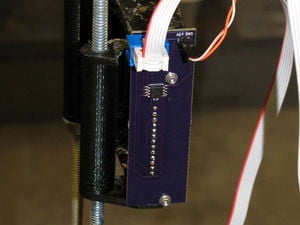
Montare la scheda sul telaio dell'estrusore (non è ancora stata progettata alcuna scheda di montaggio).
Collegare i vari componenti ai rispettivi pin etichettati sulla scheda del controller (schermo LCD, encoder, riscaldatore, ecc.)
Una volta installata la scheda del sensore, il suo cavo di comunicazione si collegherà al connettore ICSP sulla scheda del controller.
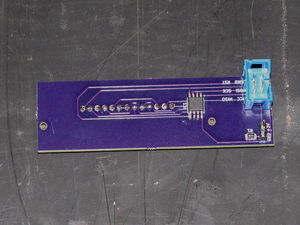
Scheda sensore
Elenco dei materiali
Scheda a circuito stampato del sensore (1)
AMS-Taos TSL1406R matrice di sensori lineari (1)
Atmel ATTINY45-20SU 8 pin SOIC (1)
Resistenza SMD da 133-150 ohm, 1206 (1)
Connettore pin 2x3 schermato (1)
1 x 2 pin header (1)
Filo di rame solido AWG 28-30 (per sensore TSL)
LED rosso da 3 mm e cavo patch con alloggiamento pin femmina 1x2
Cavo a nastro a sei conduttori, lunghezza 1 m, con alloggiamenti a chiave
Vite M2 x 12mm (2)
Rondella M2 (2)
Assemblea
Il sensore è dotato di piazzole e fori più piccoli dei tipici connettori a pin con passo da 0,1" (2,54 mm). NON tentare di utilizzare un connettore a pin standard e di forare il sensore; costano 30 $.
Saldare i componenti SMD sulla parte anteriore della scheda del sensore.Posizionare i componenti SMD e rifluire. Saldare i pin header 2x3 e 1x2 alla parte anteriore della scheda.
Saldare la matrice lineare alla scheda.Saldare brevi pezzi di filo di rame sul retro della scheda e saldare la matrice di sensori TSL1406R ai fili di rame.
Compilare e flashare il firmware sull'AVR del sensore ( qui ).
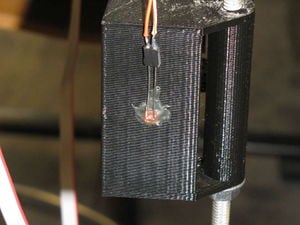
LED nel rivestimento.Installare il LED nella copertura con resina epossidica.
Sensore nel rivestimento.Installare il sensore nella guaina stampata con due viti M3 x 12 mm e rondelle. Collegare il LED al connettore a 1x2 pin e collegare il cavo a nastro a 6 conduttori al connettore a 2x3 pin protetto. Collegare l'altra estremità del cavo a nastro al connettore icsp sulla scheda controller.
Come calibrare l'estrusore del filamento DC
Ciò richiede un sistema GNU/Linux e una conoscenza ragionevolmente avanzata di hardware e software. In particolare, devi sapere come modificare un programma, come compilare un programma per un microcontrollore AVR autonomo e come caricare quel programma sul microcontrollore. Questa pagina spiega brevemente come fare queste cose, ma le spiegazioni non sono rivolte ai principianti.
Panoramica dei passaggi
Ottenere dipendenze
Creare un firmware di debug.
Carica il firmware di debug sulla scheda del sensore.
Carica il firmware di monitoraggio su un Arduino.
Controllare l'uscita del sensore.
Regolare il firmware di debug e ripetere fino a quando il risultato non è soddisfacente.
Caricare il firmware regolare modificato sulla scheda del sensore.
Regolare il firmware e ripetere fino a quando il risultato non è soddisfacente.
Caricare il firmware di produzione sulla scheda del sensore.
Costruire il firmware della scheda madre e caricarlo sulla scheda madre.
Come funzionano questi passaggi
Ecco alcune informazioni su come funzionano questi passaggi.
Ottenere dipendenze
Dovrai procurarti la libreria per il tuo display LCD e inserirla nelle librerie nella cartella del tuo sketch book. Avrai bisogno delle librerie Arduino dal nostro GitHub e inserirle nella cartella del tuo sketch book. Ecco un link alle librerie Arduino [1] . La libreria per il tuo display potrebbe dover essere concatenata a seconda di cosa sta facendo.
Creazione del firmware
Il repository github contiene tutte le fonti nella directory firmware. Il firmware per la scheda madre è in extruder, per il sensore è in sensor. Il codice in sensor-graph è per l'Arduino di monitoraggio che viene utilizzato per mostrare i dati misurati sullo schermo.
Se tutti i requisiti sono installati, tutto può essere compilato utilizzando il comando make. (L'installazione del pacchetto arduino-mk dovrebbe contenere tutto ciò di cui hai bisogno.) Anche il codice in extruder e sensor-graph dovrebbe essere compilabile dall'interfaccia utente di Arduino, ma potrebbe non funzionare.
Caricamento del firmware
Il firmware viene caricato tramite ICSP. Utilizziamo un Beaglebone che collega quattro dei suoi pin digitali e l'alimentazione a 3,3 V al connettore ICSP. Per farlo funzionare, è necessario un file di configurazione avrdude. Inoltre, la versione avrdude di Debian Jessie (e precedenti) ha un bug che ne impedisce il funzionamento. Questo è stato risolto in Stretch. Per un esempio di come si fa, vedere flash-bbb e avrdude.conf in https://github.com/mtu-most/franklin/tree/master/server/ .
Quando si carica il firmware, deve essere utilizzato il connettore ICSP sulla scheda che è programmata. Questo è il connettore schermato a 6 pin. La chiave del connettore è sempre sul lato dell'alimentazione.
Stiamo utilizzando una connessione USB per connetterci al beagle bone, quindi se non utilizzi una connessione USB questi comandi non funzioneranno. Devi spostare il firmware dal computer al beagle bone con il comando " scp build-uno/extruder.hex debian@192.168.7.2: " e poi dal beagle bone alla macchina con " sudo avrdude -C +avrdude.conf -c bbbmelzi -p atmega328p -U lfuse:w:0xe2:m ". Questo comando non verrà eseguito se non hai questo [2] dal repository Franklin. Puoi metterlo sul beagle bone con questo comando " scp avrdude.conf debian@192.168.7.2: ".
Esecuzione del programma monitor
Per questo, il computer deve avereinstallato python-websocketd (che richiede python-network e python-fhs dallo stesso posto). Il firmware deve essere installato su un arduino e un cavo deve collegare tutti i pin tra l'intestazione ICSP sull'Arduino e l'intestazione ISCP sulla scheda del sensore. L'Arduino non ha un'intestazione protetta; la chiave dovrebbe essere all'esterno della scheda. In caso di dubbi, misura quali pin hanno 5 V su di essi.
Lo script del server deve ottenere i dati seriali dall'Arduino sul suo input standard. Ciò significa che la porta deve prima essere impostata, e poi deve essere fornita al server:
Quindi usa un browser per andare su http://localhost:4567/ . Dovresti vedere un grafico della misurazione del sensore.
Esecuzione del programma spia
Per il secondo passaggio, l'output del firmware regolare deve essere monitorato. Questo viene fatto con il programma sensor-spy. Viene caricato su un Arduino simile al programma sensor-graph e invia in output l'ultimo valore ricevuto del sensore alla porta seriale.
Per utilizzarlo, è sufficiente visualizzare l'output della porta seriale con:
Quando si sposta un pezzo di filamento attraverso il sensore, il suo valore dovrebbe cambiare.
Cosa cambiare
Il firmware del sensore ha due impostazioni definite nella parte superiore che devono essere modificate a seconda della build. Sono chiamate SKIP e DELAY. L'output dal sensore dovrebbe essere approssimativamente orizzontale. Nella maggior parte dei sensori lo è, ma vicino ai bordi scende a zero. Per questo motivo, i bordi non vengono utilizzati. SKIP definisce quanti pixel vengono saltati su entrambi i lati. Nota che il numero totale di pixel è 768 e misura ogni 2^EACHBITS pixel, quindi se vedi che qualcosa accade al pixel 20 e EACHBITS è 5, è in realtà pixel 20*32=640.
Per il monitoraggio, potresti voler diminuire EACHBITS. Nota che il numero totale di pixel misurati non può essere maggiore di 255.
DELAY è il tempo di integrazione, in unità arbitrarie. Impostalo in modo che il segnale sia il più alto possibile, ma non sovraesposto.
Il pixel più basso viene utilizzato come posizione dell'ombra. Ma se il suo valore è superiore a VALID_LIMIT, viene scartato e nessuna misurazione viene inviata alla scheda madre. Quindi assicurati che sia sopra quel valore normalmente e che l'ombra lo porti sotto quel valore.
Fatto questo, dovrebbe essere caricato il firmware normale. Ma inizialmente, questo viene fatto con una modifica: la riga che definisce SEND_MAX dovrebbe essere decommentata. Ciò fa sì che il sensore invii il valore massimo di ogni misurazione invece della posizione dell'ombra. Il programma sensor-spy dovrebbe essere usato per controllare se DELAY è buono, e se non lo è dovrebbe essere regolato.
Una volta che è a posto, la riga SEND_MAX dovrebbe essere nuovamente commentata e la versione finale del firmware dovrebbe essere caricata. Il sensore-spia può essere utilizzato di nuovo per verificare che tutto funzioni bene.