
Recyclebot v5.0/ar

| ملفات التصنيع | https://github.com/jmccaslin93/Recyclebot-v5.0 |
|---|---|
| رخصة الأجهزة | CERN-OHL-S |
| الشهادات | ابدأ الحصول على شهادة إدارة السلامة والصحة المهنية (OSHWA) |
| يكتب | Recyclebot |
|---|---|
| المؤلفون | جو مكاسلين أوبراي |
| حالة | |
| سنين | 2016 |
| صنع | لا |
| تم تكرارها | لا |
| يكلف | 423.36 دولار أمريكي |
التصميم غير مكتمل الوظائف - استخدم بدلاً منه RepRapable Recyclebot: جهاز بثق ثلاثي الأبعاد مفتوح المصدر لتحويل البلاستيك إلى خيوط طباعة ثلاثية الأبعاد










يجري تطوير جهاز Recyclebot V5.0 لبثق خيوط الطباعة ثلاثية الأبعاد من قِبل قسم الأجهزة مفتوحة المصدر في جامعة ميشيغان التقنية. يعمل الجهاز حاليًا يدويًا، ونسعى جاهدين لإصدار نسخة أوتوماتيكية بالكامل في أوائل عام 2017. في هذه النسخة، سيتم تبسيط جميع المكونات الإلكترونية لتصبح سهلة التركيب والتشغيل، حيث ستتضمن لوحة Arduino Mega مع درع مخصص، بينما ستُوصل جميع المكونات الإلكترونية الأخرى مباشرةً بصندوق إلكتروني، مما يُبسط عملية التصنيع ويُقلل التكاليف. ستكون واجهة المستخدم عبارة عن مُشفّر دوار قابل للنقر، مع شاشة LCD بحجم 20×4. بعد استكمال تطوير باقي الوظائف المطلوبة، سيتم تبسيط التصميم والتصنيع. سيُطلق على هذه النسخة النهائية من الجهاز اسم Recyclebot V5.1. صُمم هذا الجهاز ليعمل بكفاءة تامة مع البلاستيك المُعاد تدويره المُحبب بواسطة النسخة الجديدة من مُحبب البلاستيك ، التي طوّرها قسم الأجهزة مفتوحة المصدر في جامعة ميشيغان التقنية، والمُقرر إصدارها في ربيع 2017.
يمكن العثور على جميع ملفات STL المطبوعة ورمز Arduino على GitHub هنا .
الأبحاث السابقة
يتمحور الدافع الرئيسي وراء تغييراتنا وتصميمنا لجهاز البثق حول حقيقة أن خصائص مادة البلاستيك المعاد تدويره تختلف اختلافًا كبيرًا عن حبيبات البلاستيك الخام. أردنا زيادة التحكم في معدلات بثق الخيوط، ومعدلات السحب واللف، وسعتها، مما أدى إلى آلة ذاتية الضبط تعتمد على خصائص الخيوط (وهو ما يختلف عن تقنيات Recyclebot السابقة). يستند تصميم الآلة بشكل عام إلى تصاميم أجهزة البثق الصناعية، حيث تمتلك جميع الوظائف نفسها، إلى جانب إصدارات Recyclebot السابقة. صممنا النظام بحيث يمكننا التحكم في كل جانب من جوانبه بدرجات متفاوتة، لاختبار وتطوير النظام الأمثل ليتم إصداره كإصدار Recyclebot V5.1. بالإضافة إلى ذلك، نتخذ خطوات لضمان سهولة الاستخدام عند بناء النظام. المواد العامة والتحكم في النظام مشابهان لتلك الموجودة في طابعة ثلاثية الأبعاد - يرجى الاطلاع على قائمة المواد أدناه.
تتوفر العديد من أجهزة بثق خيوط الطباعة ثلاثية الأبعاد مفتوحة المصدر للاستخدام المنزلي عبر الإنترنت. ومنها على سبيل المثال:
- ليمان/مولير - [1]
يتضمن هذا التصميم المكتبات المستخدمة للتحكم في أردوينو: مكتبات أردوينو
- الكريستال السائل
- جهاز AccelStepper
أهداف المشروع
الهدف الرئيسي لهذا المشروع هو القدرة على صنع جهاز بثق خيوط قوي وذاتي التصحيح لاستخدامه مع أي نوع من الخيوط أو المواد الخام البلاستيكية المعاد تدويرها في النظام.
بالإضافة إلى ذلك، إليك الأهداف التالية التي تم إدراجها في وظائف التصميم:
- الأهداف في التصميم الحالي
- قم بإنشاء نسخة محدثة من Recyclebot تشمل النظام بأكمله، بما في ذلك جهاز البثق، وقسم التبريد، واستشعار القطر والتحكم فيه، واللف التلقائي، ومعدلات تصنيع النظام.
- التحكم في وظائف مكونات النظام الفردية وتصميم واجهة المستخدم.
- انخفاض كبير في السعر ومتطلبات المهارة للبناء مقارنة بإصدارات Recyclebot السابقة.
- تمثيل أساسي لوظائف النظام المثالي. من السهل جدًا إجراء التغييرات التي نرغب بها، الآن وقد اكتملت جميع العناصر الأساسية.
- أهداف في Recyclebot الإصدار 5.1
- عملية بثق الخيوط الأوتوماتيكية بالكامل، بما في ذلك التحكم في المعدل والقطر ونوع البلاستيك.
- قسم تبريد الحمام المائي (إذا لزم الأمر، للحصول على معدلات تصنيع عالية وتحكم دقيق في القطر).
- سهولة الاستخدام في مجال البناء. تعليمات موثقة جيدًا يمكن لأي شخص اتباعها لبناء نظامنا وتشغيله.
- نموذج عمل مربح لبيع أنظمة البثق وخيوط الطباعة على حد سواء.
تصميم
يمكن تقسيم التصميم إلى 5 وظائف متميزة.
- الطارد
- قسم التبريد
- أداة سحب الخيوط
- لفافة خيوط
- يتحكم
يمكن العثور على جميع ملفات STL المطبوعة ورمز Arduino على GitHub هنا .
الطارد
يحتوي التصميم الحالي على ثلاثة محركات خطوية. ويحتوي جهاز البثق نفسه على محرك خطوي من نوع NEMA 23، مع علبة تروس بنسبة 1:15. ويرتبط هذا المحرك برأس حفر عبر وصلة مطبوعة بتقنية الطباعة ثلاثية الأبعاد. ويحيط برأس الحفر قادوس مطبوع، مصمم لحفظ مادة التغذية لجهاز البثق.
أثناء تحريك مثقاب الحفر لأسفل، ستلاحظ دخوله أنبوبًا ملفوفًا بسلك نيكروم. يوجد أيضًا على الأنبوب مقاوم حراري يُستخدم لقياس درجة حرارة الطارد. يمكن تغليف هذه الأسطوانة بمادة عازلة، كما هو موضح في الرسومات الجانبية. في نهاية الأنبوب، توجد فوهة بها ثقب محفور في المنتصف. تُثبّت مجموعة الطارد هذه على قاعدة لتثبيت جميع الأجزاء.
قسم التبريد
يتألف قسم التبريد حاليًا من 5 مراوح تبريد لوحدة المعالجة المركزية (CPU) بحجم 50 مم، مُرتبة بطريقة تُحسّن تدفق الهواء حول خيوط الطباعة، كما هو موضح في الأشكال الجانبية. تُثبّت هذه المراوح على اللوحة الأم بواسطة نظام تثبيت مغناطيسي. يحتوي هذا النظام على قاعدة مُلصقة باللوحة، مع وجود مغناطيسات في كلٍ من لوحات التثبيت ومجموعة المراوح. صُمّم هذا النظام ليكون قابلاً للتعديل والتغيير، حيث يُمكن استبدال وحدات التبريد، وخاصةً وحدة التبريد المائي التي ستُطرح في الإصدار 5.1 من برنامج Recyclebot.
قسم سحب الخيوط
لضبط قطر الخيط، يجب تعديل معدل البثق من جهاز البثق. في نموذجنا، نجري هذا التعديل يدويًا عن طريق سحب الخيط باستخدام محرك خطوي، ومحورين مضغوطين مزودين ببكرات من اليوريثان، ونظام هيكل مطبوع ونظام سير. ولتنفيذ ذلك، يجب أن يتمتع مشغل المحرك الخطوي بدقة عالية في الخطوات الدقيقة لضمان ثبات قطر الخيط. يمكن التحكم بهذا المحرك من خلال واجهة المستخدم، إلى جانب جميع الوظائف الرئيسية الأخرى للنظام.
قسم لف الخيوط
تتضمن الخطوة الأخيرة من العملية لفّ الخيط على بكرة. لاحظنا أنه في حال كان المحرك يعمل بقوة كبيرة، فإن الخيط يُسحب من وحدة السحب، مما يجعل التحكم في القطر غير ممكن. ولحل هذه المشكلة، خفضنا التيار من وحدة التحكم إلى المحرك إلى أقل من 0.4 أمبير. سمح هذا لآلة اللف بالدوران ولفّ الخيط، ولكن ليس بقوة تؤثر على القطر.
يتحكم
يتم التحكم بجميع العناصر من خلال لوحتي تجارب ومنافذ أردوينو. للاطلاع على مخطط المنافذ، يُرجى الرجوع إلى كود أردوينو على GitHub هنا .
قائمة المواد
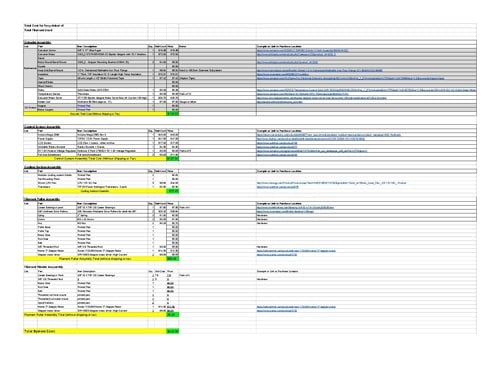
حاضِر
مناقشة
يخضع هذا الإصدار من برنامج Recyclebot حاليًا لاختبارات مكثفة وتطوير مستمر. إذا كنت تتوقع إصدارًا خاليًا من جميع الأخطاء، فانتظر الإصدار Recyclebot v5.1، المقرر إصداره في ربيع 2017. جميع الملفات المطبوعة والبرمجيات موجودة على GitHub هنا .
تتضمن بعض أفكار التحسين المستقبلية مراقبة القطر الثابت وإجراء التعديلات، ونظام توجيه لف الخيوط الشامل.
الاستنتاجات
ستواصل مؤسسة Open Source Hardware Enterprise تطوير Recyclebot v5. من المتوقع إصدار نسخة مصقولة في ربيع 2017. النسخة الحالية هي نموذج أولي غير مكتمل وإثبات للمفهوم.
المساهمون
| المؤلفون | |
|---|---|
| رخصة | CC-BY-SA-3.0 |
| المنظمات | مختبر تكنولوجيا الاستدامة المفتوح التابع لجامعة ميشيغان للتكنولوجيا ، جامعة ميشيغان للتكنولوجيا |
| يرجى الاستشهاد به كالتالي: | Jmccaslin (2016–2025). "Recyclebot v5.0" . Appropedia . تم الاسترجاع في 19 يونيو 2026 . |