
ДИЗАЙН НЕ ПОЛНОСТЬЮ ФУНКЦИОНАЛЬНЫЙ — вместо него используйте RepRapable Recyclebot: экструдер с открытым исходным кодом для 3D-печати для преобразования пластика в нить для 3D-печати.










Экструдер нити для 3D-принтера Recyclebot V5.0 разрабатывается компанией Open Source Hardware Enterprise компании Michigan Tech. В настоящее время экструдер работает и может выдавливать нить в ручном режиме, поэтому мы стремимся выпустить полностью автоматическую версию в начале 2017 года. В автоматической версии вся электроника будет чрезвычайно упрощена до типа Plug and Play, включающего Arduino Mega с специальный экран, а вся остальная электроника подключается непосредственно к электронному блоку, что упрощает конструкцию и снижает затраты. Пользовательский интерфейс будет представлять собой интерактивный поворотный регулятор с ЖК-дисплеем 20х4. После того, как остальная часть желаемого функционала будет разработана, проектирование и конструкция будут упрощены. Эта окончательная версия экструдера будет называться Recyclebot V5.1. Это оборудование было разработано с учетом полной функциональности переработанного пластика, гранулированного с помощью новой версии пластикового гранулятора , разработанной MTU OSHE, выпуск которой запланирован на весну 2017 года.
Все распечатанные stl-файлы и код Arduino можно найти на GitHub здесь .
Содержание
Предыдущее исследование
Основная мотивация наших изменений и дизайна наших экструдеров связана с тем фактом, что характеристики материала переработанного пластика сильно отличаются от необработанных пластиковых гранул. Мы хотели иметь больший контроль над скоростью экструзии нити, производительностью и производительностью вытягивающих и намоточных машин, что привело к созданию саморегулирующейся машины, основанной на характеристиках нити (которая отличается от предыдущих технологий рециркуляционных роботов). Компоновка машины во многом основана на конструкциях промышленных экструдеров, обладающих всеми теми же функциями, что и предыдущие версии Recyclebot. Мы разработали систему таким образом, чтобы мы могли контролировать каждый аспект системы в различной степени, чтобы протестировать и разработать идеальную систему, которая будет выпущена как Recyclebot V5.1. В дополнение к этому мы предпринимаем шаги для обеспечения простоты использования при построении системы. Общий материал и управление системой аналогичны материалам 3D-принтера — см. спецификацию ниже.
В Интернете доступно множество других домашних экструдеров для 3D-принтеров с открытым исходным кодом. Некоторые из них включают в себя:
- Лайман/Мульер - [1]
Этот проект включает в себя библиотеки, используемые для управления Arduino: Библиотеки Arduino.
- Жидкокристаллический
- AccelStepper
Цели проекта
Основная цель этого проекта — создать надежный саморегулирующийся экструдер для нитей, который можно будет использовать для работы с любыми нитями или переработанным сырьем типа пластика в системе.
Помимо этого, в функционал дизайна заложены следующие цели:
- Цели текущего дизайна
- Создайте обновленную версию Recyclebot, включающую в себя всю систему, включая экструдер, секцию охлаждения, измерение и контроль диаметра, автоматическую намотку и скорость производства системы.
- Контроль над функциональностью отдельных компонентов системы и дизайном пользовательского интерфейса.
- Значительное снижение цен и требований к навыкам строительства по сравнению с предыдущими версиями Recyclebot.
- Базовое представление функциональности идеальной системы. Теперь, когда все строительные блоки готовы, очень легко внести желаемые изменения.
- Цели в Recyclebot V5.1
- Полностью автоматическая экструзия нити, включая контроль скорости, диаметра и типа пластика.
- Секция водяного охлаждения (при необходимости для достижения высокой производительности и точного контроля диаметра).
- Удобство использования при строительстве. Хорошо документированные инструкции, которым каждый может следовать при создании и эксплуатации нашей системы.
- Выгодная бизнес-модель для продажи экструзионных систем и нити для принтеров.
Дизайн
Дизайн можно разбить на 5 различных функций.
- Экструдер
- Секция охлаждения
- Съемник нити
- Устройство намотки нити
- Контроль
Все распечатанные stl-файлы и код Arduino можно найти на GitHub здесь .
Экструдер
Текущая конструкция оснащена 3 шаговыми двигателями. Сам экструдер оснащен шаговым двигателем NEMA 23 с редуктором 1:15. Затем этот двигатель соединяется со сверлом через муфту, напечатанную на 3D-принтере. Вокруг сверла находится печатный бункер, предназначенный для хранения сырья для экструдера.
Продвигая сверло вниз, вы увидите, что оно входит в трубу, обмотанную нихромовой проволокой. К трубе также прикреплен термистор, который используется для измерения температуры экструдера. Этот блок ствола можно обернуть изоляцией, как показано на рисунках рядом. На конце трубы имеется насадка с просверленным отверстием посередине. Этот узел экструдера прикреплен к основанию, чтобы все предметы оставались устойчивыми.
Секция охлаждения
В настоящее время секция охлаждения состоит из вентиляторов ЦП размером 5x50 мм, расположенных таким образом, чтобы максимизировать поток воздуха вокруг нити накала (см. рисунки отдельно). Этот вентиляторный блок крепится к плате с помощью магнитной системы крепления. Эта система имеет основание, прикрепленное к плате, с магнитами как в монтажных пластинах, так и в узле вентилятора. Эта система была разработана с учетом модульного эффекта с переключением узлов охлаждающего устройства, в частности узла водяной бани, который будет выпущен в Recyclebot v5.1.
Секция вытягивания нити
Чтобы отрегулировать диаметр нити, необходимо отрегулировать скорость экструзии из экструдера. В нашей модели мы делаем эту регулировку, вручную протягивая нить с помощью шагового двигателя, двойных осей сжатия с уретановыми роликами, а также печатной конструкции и системы ремней. Для этого драйвер шагового двигателя должен иметь высокий уровень микрошагов, чтобы гарантировать постоянный диаметр нити. Этим двигателем можно управлять с помощью пользовательского интерфейса, а также всеми другими основными функциями системы.
Секция намотки нити
Последний этап процесса включает в себя намотку нити на катушку. Мы обнаружили, что если двигатель имеет значительную мощность, нить будет вытягиваться из узла съемника, и контроль диаметра будет недостижим. Чтобы решить эту проблему, мы снизили ток от драйвера к двигателю до <0,4 А. Это позволило намотчику вращаться и наматывать нить, но не с такой силой, чтобы это повлияло на диаметр.
Контроль
Все элементы управляются с помощью двух макетов и выводов Arduino. Чтобы увидеть распиновку, пожалуйста, обратитесь к коду Arduino на GitHub здесь .
спецификация
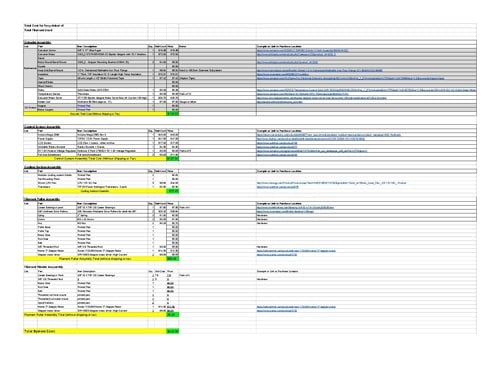
Текущий
Обсуждение
Эта версия Recyclebot в настоящее время находится на стадии тщательного тестирования и постоянной разработки. Если вы ожидаете версию со всеми исправленными ошибками, ждите Recyclebot v5.1, релиз которого запланирован на весну 2017 года. Все распечатанные файлы и код находятся на GitHub здесь .
Некоторые идеи будущих улучшений включают в себя контроль и регулировку постоянного диаметра, а также комплексную систему направляющих намотки.
Выводы
Компания Open Source Hardware Enterprise продолжит разработку Recyclebot v5. Ожидайте, что доработанная версия выйдет весной 2017 года. Текущая версия представляет собой черновой прототип и проверку концепции.