
Wire Following System/it
 Fig 1: Circuito generatore di fili
Fig 1: Circuito generatore di fili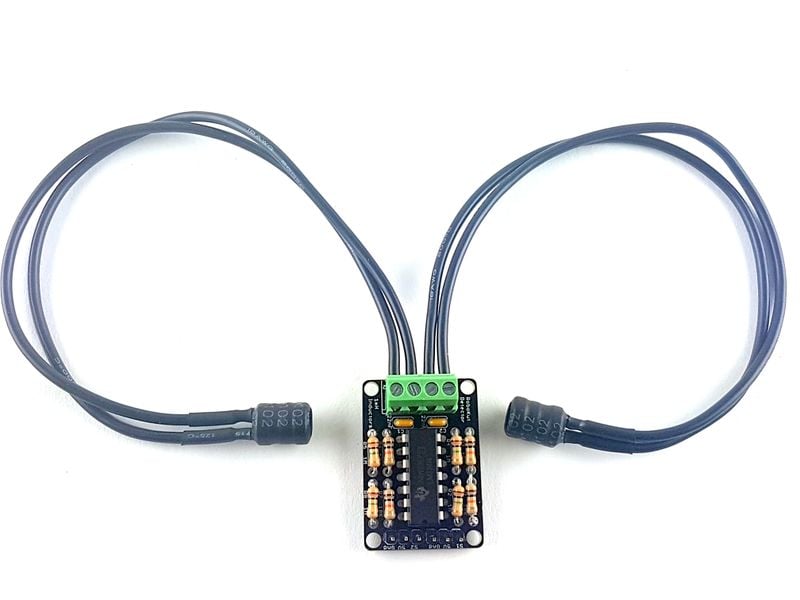 Fig 2: Circuito del sensore
Fig 2: Circuito del sensore


Introduzione
Questo è il sistema di tracciamento del filo per OSHE Growbot . È costituito da due circuiti: un generatore del filo perimetrale e un circuito sensore LC. Il generatore del filo perimetrale indurrà una frequenza compresa tra 32 e 43 Hz su un filo perimetrale. Questo filo perimetrale è costituito da 30 metri di filo calibro 22, disposto lungo il percorso che il Growbot seguirà intorno al giardino. Il circuito LC ha due induttori in grado di rilevare il segnale che attraversa il filo perimetrale. Ci sarà un induttore su ciascun lato del filo, che rileva quando si avvicina. Poiché i Raspberry Pi non dispongono di ingresso analogico, è necessario utilizzare un ADC. Tutti i materiali e il codice sono disponibili di seguito. Il circuito del generatore del filo perimetrale sarà situato nell'unità abitativa del Growbot. Il circuito sensore sarà sul Growbot. Questo sistema funziona con i motori Odrive per controllare il Growbot.
Per i dettagli di questi circuiti: [ Robot Shop ]
File e distinta base
File per stampe 3D disponibili su [ <aggiungi collegamento> OSF] File per il codice Python del Raspberry Pi disponibili su Github .
Ecco anche:Schemi


- ---
Figura 1 (sinistra): schema del generatore di fili Figura 2 (destra): schema del sensore
Forniture extra
Strumenti e materiali di consumo aggiuntivi rispetto a quelli elencati nella distinta base.
Strumenti
- Saldatore
- Spellafili e tronchesi
- stampante 3D
Materiali di consumo
- Saldare
- Fascette stringicavo
- Super colla
- Cavo 20AWG per induttori
- 100' di filo multifilare calibro 22 per perimetro
Prima di iniziare
Esaminate la procedura descritta di seguito e procuratevi tutti gli strumenti e i materiali di consumo necessari per iniziare la costruzione. L'elenco degli strumenti sopra riportato non è necessariamente esaustivo. Assemblaggio e cablaggio sono i passaggi successivi alla saldatura dei componenti al PCB, ai connettori EndsAndPins e ai due WireHolder .
Software da scaricare e installare
- Raspberry Pi necessita di Python3-pip: [ RaspPi ]
- Abilita I2C su Raspberry Pi: [ Adafruit ]
- Configurazione da Raspberry Pi ad ADC: [ Adafruit ]
Assemblaggio e cablaggio
Meccanica
- ---
- Fissare BotEnd all'estrusione di alluminio con una vite da ??m e ??.
- Posizionare WireHolder in BotEnd e fissarlo con un perno o una vite e un bullone da ??m
- Posizionare SensorEnd nel WireHolder e fissarlo con un perno o una vite e un bullone da ??m
- Inserire l'induttore nello slot del SensorEnd, con un po' di supercolla
- Fissare il filo con una fascetta nelle piccole fessure del WireHolder
Cablaggio

- ---
- Raspberry Pi su ADS mostrato sopra
- Le uscite analogiche del circuito del sensore vanno ad A0 e A1 sull'ADS
- Il circuito del sensore necessita di una fonte di alimentazione da 5 V
- Il circuito del generatore del filo perimetrale necessita di una fonte di alimentazione da 12 V
Test
- I test iniziali dei sensori utilizzano autoTest.py
- Raccogli i valori Min e Max e sostituiscili nella posizione appropriata in autoTest.py
- I motori Odrive sono pronti per i test
Note
- Assicurati che i cavi del sensore dell'induttore siano sufficientemente lunghi prima di tagliarli
- Prova il codice prima di incollare gli induttori o di legare il filo con le fascette
- Ulteriori procedure sono disponibili qui .
| Descrizione | Contare |
|---|---|
| PCB del generatore | 1 |
| PCB del sensore | 1 |
| Convertitore analogico-digitale ADS1115 | 1 |
| Resistore da 3,3 kΩ | 1 |
| Resistore da 12 kΩ | 1 |
| Resistore da 47 Ω | 1 |
| Resistore da 10 kΩ | 4 |
| Resistore da 1 MΩ | 4 |
| Potenziometro da 4,7 kΩ | 1 |
| Resistore da 12 kΩ | 1 |
| Condensatore da 100 nF | 2 |
| Condensatore da 1,2 nF | 1 |
| Condensatore da 1 uF | 1 |
| Condensatore da 22 nF | 2 |
| Induttore da 1 mH | 2 |
| Amplificatore LM324N | 1 |
| Timer NE555 | 1 |
| Connettore a barilotto 2,1x5,5 mm | 1 |
| Connettore terminale a 2 posizioni | 3 |
| Connettore a spina ad angolo retto a 3 posizioni | 2 |
| Cavo 20AWG da circa 1 metro (per gli induttori) | 1 |
| Filo multifilare da ~100' calibro 22 (per il filo seguente) | 1 |
| Autori | Erica Umlor |
|---|---|
| Licenza | CC-BY-SA-4.0 |
| Lingua | Inglese (en) |
| Traduzioni | Tedesco , Francese , Coreano |
| Imparentato | 3 sottopagine , 6 pagine collegate qui |
| Impatto | 356 visualizzazioni di pagina ( altro ) |
| Creato | 26 aprile 2020 di Zach Arnold |
| Ultima modifica | 19 marzo 2022 di Irene Delgado |
| Citare come | Erica Umlor (2020–2022). "Wire Following System" . Appropedia . Consultato il 7 maggio 2025 . |
| Query API | base , semantico , html , file , altro |