
Clerck, a RepRap 3D printer hanging from the ceiling/pt

| Tipo | |
|---|---|
| Autores | Torbjørn Ludvigsen |
| Status | Projetado |
| Anos | 2006 |
| Custo | USD 250 |
Uma impressora 3D RepRap pendurada no teto.
O projeto RepRap apresentou ao mundo a impressão 3D barata em pequena escala em 2006. Seu design foi intencionalmente mal pensado. A ideia era que uma impressora 3D capaz de imprimir suas próprias peças seria aprimorada por meio de iterações evolutivas, independentemente da qualidade do design inicial. Isso se mostrou bastante correto, pois uma grande comunidade cresceu rapidamente em torno dos primeiros designs da RepRap. Os usuários da RepRap começaram a experimentar e remixar todas as partes da impressora, incluindo seu sistema de coordenadas cartesianas.
Arquivos de origem e documentação externa
| Código fonte: | atualmente no repositório Gitlab , anteriormente no repositório Github | [1] link rápido para firmware |
| Licenças: | O repositório possui GPLv2, o blog usa a licença Gnu Free Documentation, os vídeos do Vimeo são licenciados CC-BY | Segue as recomendações da FSF |
| Processo de construção: | Postagens de blog [2] , [3] , [4] , [ 5 ] , [6] , [7] , [8] , [9] , [10] , [11] , [12] , [13] , [14] , [15] , [16] | vídeos e imagens, muito detalhados |
| Tópico de desenvolvimento: | Fórum RepRap Hangprinter , veja também o tópico de lançamento do projeto original | |
| Página Wiki: | em reprap.org | desatualizado |
| Todos os vídeos: | Usuário do Vimeo 23166500 | |
| Página do projeto: | hangprinter.org |
Compreendendo o mercado
Os primeiros projetos de impressoras 3D não cartesianas foram o Tripod-Repstrap (2007) e seus sucessores geometricamente semelhantes, Rostock (2012) [ 1 ] e Lisa Simpson (2013). [ 2 ] [ 3 ] Outros projetos RepRap não cartesianos incluem GUS Simpson (2013), [ 4 ] Morgan (2013), [ 5 ] Wally (2013) [ 6 ] e Feather (2013). [ 7 ]
Todas essas impressoras tentam trocar cálculos geométricos mais pesados por eliminações de requisitos de hardware ou etapas de construção demoradas. Todas elas possuem frames, e ainda há ciclos de clock extras em suas CPUs Arduino. A ideia da Hangprinter é ignorar completamente o frame personalizado rígido e, em vez disso, depender de conexões de fios a estruturas rígidas já construídas, como o interior de casas. Este projeto se enquadra na categoria mais geral de robôs de cabo ( veja o link da Wikipédia ).
Fazer isso funcionar levaria a volumes de impressão potencialmente enormes por preços de até US$ 300. Os preços dos concorrentes são:
| Nome | Preço | Volume de impressão |
|---|---|---|
| Grande Rep | aproximadamente US$ 40.000 [ 8 ] | 1 m 3 |
| Gigabot XL | cerca de US$ 13.000 [ 9 ] | 0,27 m³ |
| X1000 | cerca de US$ 16.000 [ 10 ] | 0,48 m³ |
Outras impressoras experimentais em larga escala incluem a impressora Big Delta da Wasp [ 11 ] e a KamerMaker, um projeto cartesiano ampliado. [ 12 ] Outras soluções experimentais para impressão em larga escala incluem a substituição da estrutura por recursos de rastreamento de linha e um veículo de suporte, como os Minibuilders. [ 13 ]
Os concorrentes apresentados são muito caros e pouco auto-reprodutivos, muitos deles nem sequer são hardware de design livre. Eles não atendem às necessidades, por exemplo, do projeto Open Source Ecology, que busca imprimir componentes estruturais de plástico, como painéis de carroceria e torres de redworm, com ferramentas OSHW.
Objetivos do projeto
Novas metas de design de projeto na Versão 4 (2018)
- Um cavalo de batalha confiável
- que as pessoas vão gostar de usar
- e se espalhando
- com fins lucrativos
Meta final declarada em 2018: Tornar-se uma Máquina de Fabricação Universal (UMM)
Objetivos iniciais do projeto
- Baixa contagem de peças
- Fácil de imprimir, montar, instalar e distribuir
- Grande volume de construção
- Barato
- Capaz de imprimir muitas de suas próprias peças
Design
O criador e a comunidade estão trabalhando na versão 4 em setembro de 2018. Veja as novas metas de design no blog de Tobben
Considerações de design para a primeira versão
- Coloque todo o hardware (exceto o conversor CA/CC) em uma única unidade.
- Apenas um vetor de força para cima, compensado com contrapeso.
- A restrição excessiva permite compensação flexível de linhas frouxas.
- Quando a impressora estiver ociosa, é possível retrair todos os fios. Permite soluções de armazenamento elegantes. Poderia torná-la popular em grandes cidades, onde o espaço interno é escasso.
- Linhas paralelas presas a carretéis comuns para evitar rotação.
 O primeiro esboço da geometria do Hangprinters.
O primeiro esboço da geometria do Hangprinters. Linhas retas são cortadas em segmentos de reta pelo firmware de Clerck. Esta é a equação que o firmware de Clerck precisa resolver para cada segmento de reta.
Linhas retas são cortadas em segmentos de reta pelo firmware de Clerck. Esta é a equação que o firmware de Clerck precisa resolver para cada segmento de reta.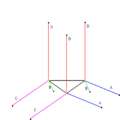 Nomeação dos eixos da geometria de Clerck. Linhas paralelas impedem a rotação. O triângulo preto é Clerck. Os pontos pretos são chamados de pontos de ancoragem. Os pontos amarelos são chamados de pontos de ação.
Nomeação dos eixos da geometria de Clerck. Linhas paralelas impedem a rotação. O triângulo preto é Clerck. Os pontos pretos são chamados de pontos de ancoragem. Os pontos amarelos são chamados de pontos de ação. Uma renderização do arquivo CAD de Clerck em novembro de 2015.
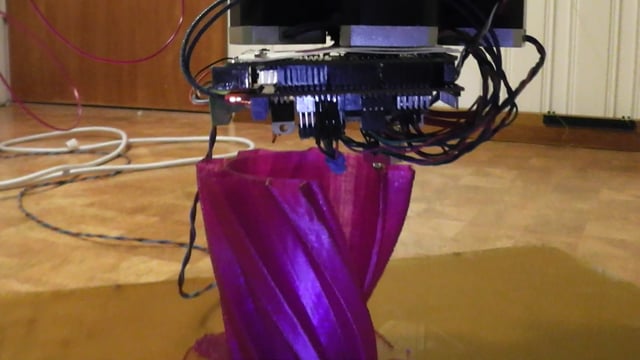
Uma renderização do arquivo CAD de Clerck em novembro de 2015. Impresso, montado e montado por Clerck, outubro de 2015.
Impresso, montado e montado por Clerck, outubro de 2015.





Vídeo mostrando o design em ação
Custos
Open BMO do Hangprinter Versão 3 (com Mechaduinos como controladores de motor de malha fechada)
!!DESATUALIZADO!!
| Item | Qtd. | Preço total | Observação |
|---|---|---|---|
| E3D V6 Volcano hot end | 1 | $ 100 | Patrocinado gentilmente pela E3d para o desenvolvimento do protótipo. Obrigado, E3d! |
| Motor de passo Nema17 | 5 | $ 60 | O protótipo utiliza o 17HS4401N. Aviso: Se você utilizar motores de passo com outro tamanho para o eixo da extrusora ou o eixo vertical, será necessário ajustar os arquivos CAD para corresponder ao seu motor. As dimensões do 17HS4401N estão codificadas no arquivo de origem.measured_numbers.scad |
| Arduino Mega | 1 | $ 10 | Compre em conjunto com RAMPS e drivers de passo para preços mais baixos |
| RAMPAS | 1 | $ 5 | O protótipo usa v1.4 |
| Suporte para driver de motor de passo drv8825 (Pololu) | 5 | $ 10 | O modelo do driver do motor de passo não é importante, desde que a corrente de saída esteja próxima da corrente máxima do motor de passo (1,7 A para 17HS4401N) |
| Rolamento 623 | 2 | $ 2 | |
| Rolamento 623 com ranhura em V | 5 | $ 5 | Atualmente, o Hangprinter (versão 2) não usa essas opções, mas elas são úteis caso você queira reduzir o desempenho da sua impressora, por exemplo, para permitir motores de passo mais leves. |
| Rolamento 608 | 4 | $ 2 | |
| Módulo RF transceptor Bluetooth JY-MCU | 1 | $ 6 | Usado conforme descrito aqui |
| Conversor de 220 V CA para 12 V (fonte de alimentação) fornecendo aproximadamente 15 A ou mais (ou seja, 180 W ou mais de potência). | 1 | $ 16 | Uma voltagem mais alta proporcionaria melhor desempenho do motor de passo. Antes de aumentar a voltagem, veja aqui . |
| Olhos de 2,7 mm dentro da peça da vara de pescar | 9 | $ 9 | |
| Engrenagem de transmissão com fresagem | 2 | $ 4 | O protótipo utiliza engrenagens hobb-goblin E3D de 5 mm de diâmetro interno. Se você usar engrenagens de transmissão com tamanho diferente, ajuste Hobbed_insert_diameter-as Hobbed_insert_heightde measured_numbers.scadacordo. |
| Conjunto de parafusos M3, porcas e porcas nyloc | 1 | $ 5 | Preço estimado, parafusos e porcas costumam ser vendidos em grandes quantidades, então o investimento pode ser maior |
| Metros de linha de pesca não elástica (dynema) | 15 | $ 1 | A linha de pesca sempre é vendida em grandes quantidades, então o investimento será maior |
| Ganchos para pontos de ancoragem | 9 | $ 5 | Qualquer gancho simples como este: link para imagem ... servirá perfeitamente. |
| Material de impressão e eletricidade para peças impressas em 3D | 1 | $ 10 | O material de impressão será vendido apenas em grandes quantidades, portanto o investimento será de pelo menos US$ 30 |
| Custo total | $ 250 | ||
Dificuldades
- Manter as rotações pequenas, apesar das forças de
- Cabo de alimentação
- Filamento
- Motores de aceleração
- Mantendo o filamento e o cabo de alimentação longe das engrenagens, da impressão e (fora da) extremidade quente.
- Configuração de firmware precisa o suficiente para manter as linhas firmes durante todo o volume de impressão
- Encontrar a posição inicial de forma confiável e repetitiva
Posição inicial
Se uma unidade IMU (acelerômetro + giroscópio) fosse adicionada, este poderia ser o único sensor necessário. O homing poderia ser feito assim:
- Se a impressora não estiver na horizontal, aperte as linhas D até que ela esteja
- Abaixe a impressora (estenda as linhas D) até que a extremidade quente bata na superfície de impressão
- Defina o comprimento D. O eixo D agora está calibrado
- Estenda as linhas D em mais 2 mm
- Embora não seja horizontal:
- Calcular a direção da inclinação
- Aperte A, B ou C para neutralizar a inclinação
- Aperte as linhas D em 2 mm
- Estamos agora na posição inicial, todos os eixos calibrados
Ideia de compensação automática de linha frouxa
Uma unidade IMU pode ser usada durante a impressão da seguinte maneira:
- Calcule alguma quantidade descrevendo o "solavanco esperado" do gcode (o Marlin e outros firmwares já fazem isso. No Marlin, o valor seria inserido na estrutura block_t)
- Use a IMU para registrar o "empurrão observado" (novamente colocando-o em block_t no Marlin)
- Escreva uma função
F(expected jerk, observed jerk)→Move_to_tighten_stringse chame-a de vez em quando
Como IMUs de 6 eixos baratas são realmente boas em registrar rotação, espero que o conceito de "jerk" inclua rotação (com rotação esperada sempre 0). O tempo será muito importante, mas o Hangprinter-Marlin já possui cinco nopoperações no meio do código de passo (veja a função workhorse em stepper.cpp), que poderiam ser utilizadas para leituras de IMU nos momentos exatos. nopDe qualquer forma, os s estão lá apenas para aguardar os chips do driver do motor de passo drv8825.
Obrigado a Dejay do forums.reprap.org por apontar a possibilidade de um mecanismo semelhante.
Próximos passos
- Adicionando uma unidade IMU barata como a MPU-6050
- Construindo uma versão menor do Clerck usando motores Nema14 para menor massa e custo
- Retire os motores da cabeça da extrusora e coloque-os nos suportes para reduzir a massa.
Referências
- ↑ http://reprap.org/wiki/Rostock
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots
| Autores | Torbjørn Ludvigsen |
|---|---|
| Licença | CC-BY-SA-3.0 |
| Citar como | Torbjørn Ludvigsen (2015–2025). “Clerck, uma impressora 3D RepRap pendurada no teto” . Apropédia . Recuperado em 30 de junho de 2025 . |