
Clerck, a RepRap 3D printer hanging from the ceiling/cs

3D tiskárna RepRap visící ze stropu.
Projekt RepRap poprvé ukázal světu levný 3D tisk v malém měřítku v roce 2006. Jejich design nebyl záměrně příliš promyšlený. Myšlenkou bylo, že 3D tiskárna, která dokáže tisknout své vlastní díly, bude vylepšena evolucí, jako jsou iterace, bez ohledu na kvalitu prvního návrhu. To se ukázalo jako docela správné, protože kolem prvních několika návrhů RepRap se rychle rozrostla velká komunita. Uživatelé RepRap začali experimentovat a remixovat všechny části tiskárny, včetně jejího kartézského souřadnicového systému.
Obsah
Zdrojové soubory a externí dokumentace
| Zdrojový kód: | aktuálně na Gitlab repo , dříve na Github repo | [1] rychlý odkaz na firmware |
| Licence: | Repo má GPLv2, blog používá Gnu Free Documentation License, videa Vimeo jsou licencována CC-BY | Dodržuje doporučení FSF |
| Proces sestavení: | Blogové příspěvky [2] , [3] , [4] , [5] , [6] , [7] , [8] , [9] , [ 10] , [11] , [12] , [13] , [14] , [15] , [16] | videa a obrázky, velmi podrobné |
| Vývojové vlákno: | Fórum RepRap Hangprinter , viz také původní vlákno pro spuštění projektu | |
| Wiki stránka: | na reprap.org | zastaralý |
| Všechna videa: | Uživatel Vimeo 23166500 | |
| Webová stránka projektu: | hangprinter.org |
Pochopení trhu
Rané nekartézské návrhy 3D tiskáren byly Tripod-Repstrap (2007) a jeho geometricky podobní nástupci Rostock (2012) [1] a Lisa Simpson (2013). [2] [3] Mezi další nekartézské návrhy RepRap patří GUS Simpson (2013), [4] Morgan (2013), [5] Wally (2013) [6] a Feather (2013). [7]
Všechny tyto tiskárny se snaží vyměnit těžší geometrické výpočty za odstranění hardwarových požadavků nebo časově náročných stavebních kroků. Všechny mají rámce a v jejich procesorech Arduino stále zbývají náhradní hodinové cykly. Myšlenkou Hangprinter je úplně přeskočit pevný vlastní rám a místo toho se spolehnout na drátová připojení k již postaveným pevným konstrukcím, jako jsou vnitřky domů. Tento design spadá do obecnější kategorie kabelových robotů ( viz odkaz na Wikipedii ).
To by vedlo k potenciálně enormním objemům tisku za ceny až do cca 300 USD. Ceny konkurentů jsou:
| Jméno | Cena | Objem tisku |
|---|---|---|
| Velký zástupce | cca 40 000 $ [8] | 1 m3 |
| Gigabot XL | cca 13 000 $ [9] | 0,27 m3 |
| X1000 | cca 16 000 $ [10] | 0,48 m3 |
Mezi další velké experimentální tiskárny patří Wasp's Big Delta Printer [11] a KamerMaker, zvětšený kartézský design. [12] Mezi další experimentální řešení pro tisk ve velkém měřítku patří nahrazení rámu funkcemi sledování čar a podpůrným vozidlem, jako jsou Minibuilders. [13]
Prezentovaní konkurenti jsou velmi drahí a málo se reprodukují, mnoho z nich není ani bezplatný designový hardware. Neuspokojují například potřeby projektu Open Source Ecology, který chce tisknout konstrukční plastové součásti, jako jsou panely karoserie automobilů a věže červů pomocí nástrojů OSHW.
Cíle projektu
Nové cíle návrhu projektu ve verzi 4 (2018)
- Spolehlivý dříč
- které budou lidé rádi používat
- a šíření
- pro zisk
Konečný cíl stanovený v roce 2018: stát se univerzálním výrobním strojem (UMM)
Prvotní cíle projektu
- Nízký počet dílů
- Snadný tisk, montáž, instalace a distribuce
- Obrovský objem stavby
- Levný
- Schopnost vytisknout mnoho vlastních částí
Design
Tvůrce a komunita pracují na verzi 4 v září 2018. Podívejte se na nové cíle designu z Tobbenova blogu
Úvahy o designu pro první verzi
- Umístěte veškerý hardware (kromě AC/DC-konvertoru) do jediné jednotky.
- Pouze jeden vektor síly směrem nahoru, kompenzovaný protizávažím.
- Přílišné omezení umožňuje flexibilní kompenzaci uvolněných čar.
- Když je tiskárna nečinná, je možné zatáhnout všechny řetězce. Umožňuje elegantní řešení úložiště. Mohlo by to být populární ve velkých městech, kde jsou vnitřní prostory vzácné.
- Paralelní šňůry připojené ke společným cívkám, aby se zabránilo rotaci.

První skica geometrie Hangprinters.
Přímé čáry jsou nasekány na čárové segmenty pomocí firmwaru Clerck. Toto je rovnice, kterou Clerckův firmware potřebuje vyřešit pro každý segment čáry.
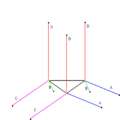
Pojmenování os Clerckovy geometrie. Rovnoběžné čáry brání rotaci. Černý trojúhelník je Clerck. Černé tečky se nazývají kotevní body. Žluté tečky se nazývají akční body.

Vykreslení souboru Clerck's CAD z listopadu 2015.

Vytištěný, namontovaný a sestavený Clerck, říjen 2015.





Video ukazující design v akci
Náklady
Otevřený BMO Hangprinter verze 3 (s Mechaduinos jako regulátory motoru s uzavřenou smyčkou)
!!ZASTARALÝ!!
| Položka | množství | Celková cena | Poznámka |
|---|---|---|---|
| Horký konec sopky E3D V6 | 1 | 100 dolarů | Laskavě sponzorováno E3d pro vývoj prototypu. Díky E3d! |
| Krokový motor Nema17 | 5 | 60 dolarů | Prototyp používá 17HS4401N. Upozornění: Pokud používáte steppery s jinou velikostí pro osu extrudéru nebo vertikální osu, budete muset upravit soubory CAD tak, aby odpovídaly vašemu motoru. Do zdrojového souboru jsou zakódovány rozměry 17HS4401Nmeasured_numbers.scad |
| Arduino Mega | 1 | 10 dolarů | Kupte si sadu s RAMPS a krokovými ovladači za nižší ceny |
| RAMPY | 1 | 5 $ | Prototyp používá v1.4 |
| drv8825 nosič ovladače krokového motoru (Pololu) | 5 | 10 dolarů | Model krokového ovladače není důležitý, pokud se výstupní proud blíží maximálnímu proudu krokového ovladače (1,7 A pro 17HS4401N) |
| Ložisko 623 | 2 | 2 $ | |
| 623 ložisková v-drážka | 5 | 5 $ | V současné době je Hangprinter (verze 2) nepoužívá, ale je dobré je mít, pokud byste někdy chtěli snížit rychlost vaší tiskárny, například abyste umožnili lehčí krokové motory. |
| Ložisko 608 | 4 | 2 $ | |
| JY-MCU Bluetooth transceiver RF modul | 1 | 6 $ | Používá se, jak je zde popsáno |
| Převodník 220V AC na 12V (napájení) poskytující cca 15 A nebo více (tj. 180 W nebo více výkonu). | 1 | 16 dolarů | Vyšší napětí by poskytlo lepší krokový výkon. Před zvýšením napětí se podívejte zde . |
| 2,7mm očka uvnitř Dia část rybářského prutu | 9 | 9 $ | |
| Odvalovací převodovka | 2 | 4 $ | Prototyp používá E3D hobb-goblin 5 mm ID. Pokud používáte hnací ozubená kola s jinou velikostí, nastavte Hobbed_insert_diametera Hobbed_insert_heightzařaďte measured_numbers.scad. |
| Sada šroubů M3, matic a matic nyloc | 1 | 5 $ | Odhadovaná cena, šrouby a matice se často prodávají ve větším množství, takže investice mohou být větší |
| Metry neelastického vlasce (dynema) | 15 | 1 $ | Vlasec se vždy prodává ve větším množství, takže investice bude větší |
| Háčky pro kotevní body | 9 | 5 $ | Jakýkoli jednoduchý háček, jako je tento: odkaz na obrázek ... postačí. |
| Tiskový materiál a elektřina pro díly 3D tisku | 1 | 10 dolarů | Tiskový materiál se prodává pouze ve větším množství, takže investice bude minimálně cca 30 USD |
| Celkové náklady | 250 dolarů | ||
Potíže
- Udržování malých rotací navzdory silám
- Napájecí kabel
- Vlákno
- Zrychlovací motory
- Chraňte vlákno a napájecí kabel od ozubených kol, tisku a (mimo) horkého konce.
- Dostatečně přesná konfigurace firmwaru, aby byly řádky v celém objemu tisku těsné
- Spolehlivé a opakovatelné nalezení výchozí polohy
Domácí pozice
Pokud byla přidána jednotka IMU (akcelerometr + gyro), může to být jediný potřebný senzor. Navádění by se dalo provést takto:
- Pokud tiskárna není vodorovná, utáhněte D-čáry, dokud nebude
- Snižte tiskárnu (prodlužte D-řádky), dokud horký konec nenarazí do tiskové plochy
- Nastavit D-délku. Osa D je nyní zkalibrována
- Prodlužte D-linky o další 2 mm
- I když není horizontální:
- Vypočítejte směr sklonu
- Utáhněte A, B nebo C, abyste zabránili sklonu
- Utáhněte D-linky 2 mm
- Nyní jsme na výchozí pozici, všechny osy jsou zkalibrovány
Nápad na automatickou kompenzaci slack line
Jednotku IMU lze během tisku použít následujícím způsobem:
- Vypočítejte nějakou veličinu popisující „očekávané trhnutí“ z gcode (Marlin a další firmware to již dělá. V Marlinu by byla hodnota zasunuta do struktury block_t)
- Použijte IMU k záznamu „pozorovaného trhnutí“ (znovu jej zastrčte do block_t v Marlin)
- Napište funkci
F(expected jerk, observed jerk)→Move_to_tighten_stringsa jednou za čas ji zavolejte
Vzhledem k tomu, že levné 6osé IMU jsou opravdu dobré v nahrávání rotace, očekávám, že pojem „trhání“ bude zahrnovat rotaci (s očekávanou rotací vždy 0). Načasování bude opravdu důležité, ale Hangprinter-Marlin již má pět nopoperací uprostřed krokovacího kódu (viz funkce workhorse v stepper.cpp), které by mohly být využity pro čtení IMU přesně ve správný čas. S nopjsou tam jen proto, aby čekali na čipy krokového ovladače drv8825.
Děkujeme Dejayovi na forums.reprap.org za upozornění na možnost podobného mechanismu.
Další kroky
- Přidání levné jednotky IMU, jako je MPU-6050
- Stavba menší verze Clerck pomocí motorů Nema14 pro nižší hmotnost a náklady
- Sejměte motory z hlavy extrudéru a na podpěry pro snížení hmoty.
Reference
- ↑ http://reprap.org/wiki/Rostock
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots