
Clerck, a RepRap 3D printer hanging from the ceiling/ru

| Тип | |
|---|---|
| Авторы | Торбьёрн Людвигсен |
| Статус | Разработанный |
| Годы | 2006 |
| Расходы | 250 долларов США |
3D-принтер RepRap, подвешенный к потолку.
Проект RepRap впервые продемонстрировал миру дешёвую малогабаритную 3D-печать в 2006 году. Конструкция была намеренно не очень продуманной. Идея заключалась в том, что 3D-принтер, способный печатать собственные детали, будет совершенствоваться путём эволюции, подобно итерациям, независимо от качества первоначальной конструкции. Это оказалось совершенно верным, поскольку вокруг первых нескольких проектов RepRap быстро сформировалось большое сообщество. Пользователи RepRap начали экспериментировать и создавать новые версии всех компонентов принтера, включая его декартову систему координат.
Исходные файлы и внешняя документация
| Исходный код: | в настоящее время в репозитории Gitlab , ранее в репозитории Github | [1] быстрая ссылка на прошивку |
| Лицензии: | Репозиторий имеет лицензию GPLv2, блог использует лицензию Gnu Free Documentation License, видео Vimeo — лицензию CC-BY. | Следует рекомендациям FSF |
| Процесс сборки: | Записи в блоге [2] , [3] , [4] , [5] , [6] , [7] , [8] , [9] , [10] , [11] , [12] , [13] , [14] , [15] , [16] | видео и изображения, очень подробные |
| Тема разработки: | Форум RepRap Hangprinter , см. также исходную ветку запуска проекта | |
| Вики-страница: | на reprap.org | устаревший |
| Все видео: | Пользователь Vimeo 23166500 | |
| Веб-страница проекта: | hangprinter.org |
Понимание рынка
Ранними некартезианскими 3D-принтерами были Tripod-Repstrap (2007) и его геометрически похожие преемники Rostock (2012) [ 1 ] и Lisa Simpson (2013). [ 2 ] [ 3 ] К другим некартезианским RepRap-принтерам относятся GUS Simpson (2013), [ 4 ] Morgan (2013), [ 5 ] Wally (2013) [ 6 ] и Feather (2013). [ 7 ]
Все эти принтеры пытаются пожертвовать сложными геометрическими вычислениями ради избавления от аппаратных требований или трудоёмких этапов сборки. У всех есть рамы, и в их процессорах Arduino ещё остаётся резерв тактовых циклов. Идея Hangprinter заключается в том, чтобы полностью отказаться от жёсткой рамки и вместо этого использовать проводные соединения с уже собранными жёсткими конструкциями, например, с внутренней стороны домов. Эта конструкция относится к более общей категории кабельных роботов ( см. ссылку на Википедию ).
Реализация этого решения может привести к потенциально огромным объёмам печати по цене около 300 долларов. Цены конкурентов:
| Имя | Цена | Объем печати |
|---|---|---|
| Большой представитель | около 40 000 долларов [ 8 ] | 1 м 3 |
| Гигабот XL | около 13 000 долларов [ 9 ] | 0,27 м 3 |
| X1000 | около 16 000 долларов [ 10 ] | 0,48 м 3 |
Другие экспериментальные принтеры для крупномасштабной печати включают принтер Big Delta от Wasp [ 11 ] и KamerMaker, увеличенную модель в декартовой системе координат. [ 12 ] Другие экспериментальные решения для крупномасштабной печати включают замену рамы на возможности отслеживания линии и вспомогательное транспортное средство, такое как Minibuilders. [ 13 ]
Представленные конкуренты очень дороги и не обладают высокой самовоспроизводимостью, многие из них даже не являются бесплатными конструкторскими решениями. Они не удовлетворяют потребностям, например, проекта Open Source Ecology, который хочет печатать конструкционные пластиковые компоненты, такие как кузовные панели автомобилей и вышки Redworm, с помощью оборудования OSHW.
Цели проекта
Новые цели дизайна проекта в версии 4 (2018)
- Надежная рабочая лошадка
- что людям понравится использовать
- и распространение
- для прибыли
Конечная цель, заявленная в 2018 году: стать универсальной производственной машиной (УММ)
Первоначальные цели проекта
- Низкое количество деталей
- Легко печатать, собирать, устанавливать и распространять
- Огромный объем сборки
- Дешевый
- Возможность самостоятельной печати многих деталей
дизайна
Создатель и сообщество работают над версией 4 в сентябре 2018 года. Ознакомьтесь с новыми целями дизайна в блоге Тоббена.
Проектные соображения для первой версии
- Объедините все оборудование (кроме преобразователя переменного тока в постоянный) в одном блоке.
- Только один вектор силы, направленный вверх, компенсируемый противовесом.
- Избыточное ограничение позволяет гибко компенсировать провисание линий.
- Когда принтер не используется, все струны можно убрать. Это элегантное решение для хранения. Может быть востребовано в крупных городах, где мало свободного пространства.
- Параллельные лески прикреплены к общим катушкам для предотвращения вращения.
 Первый набросок геометрии Hangprinters.
Первый набросок геометрии Hangprinters. Прошивка Clerck разбивает прямые линии на отрезки. Именно это уравнение прошивка Clerck должна решить для каждого отрезка.
Прошивка Clerck разбивает прямые линии на отрезки. Именно это уравнение прошивка Clerck должна решить для каждого отрезка.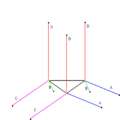 Наименование осей геометрии Клерка. Параллельные линии препятствуют вращению. Чёрный треугольник — это Клерк. Чёрные точки называются опорными точками. Жёлтые точки называются точками действия.
Наименование осей геометрии Клерка. Параллельные линии препятствуют вращению. Чёрный треугольник — это Клерк. Чёрные точки называются опорными точками. Жёлтые точки называются точками действия. Рендер CAD-файла Клерка по состоянию на ноябрь 2015 г.
Рендер CAD-файла Клерка по состоянию на ноябрь 2015 г. Распечатанный, смонтированный и собранный Клерк, октябрь 2015 г.
Распечатанный, смонтированный и собранный Клерк, октябрь 2015 г.





Видео, демонстрирующее конструкцию в действии
Стоимость
Открыть BMO Hangprinter версии 3 (с Mechaduinos в качестве контроллеров двигателей с замкнутым контуром)
!!УСТАРЕЛО!!
| Элемент | Кол-во | Общая цена | Примечание |
|---|---|---|---|
| E3D V6 Volcano хот-энд | 1 | 100 долларов | Разработка прототипа любезно предоставлена компанией E3d. Спасибо, E3d! |
| Шаговый двигатель Nema17 | 5 | 60 долларов | В прототипе используется двигатель 17HS4401N. Внимание: если вы используете шаговые двигатели с другим размером оси экструдера или вертикальной оси, вам потребуется скорректировать файлы CAD для соответствия вашему двигателю. Размеры двигателя 17HS4401N закодированы в исходном файле.measured_numbers.scad |
| Ардуино Мега | 1 | 10 долларов | Купите комплект с RAMPS и шаговыми драйверами по более низкой цене. |
| РАМПЫ | 1 | 5 долларов | Прототип использует v1.4 |
| Плата драйвера шагового двигателя drv8825 (Pololu) | 5 | 10 долларов | Модель шагового драйвера не имеет значения, главное, чтобы выходной ток был близок к максимальному току шагового двигателя (1,7 А для 17HS4401N) |
| подшипник 623 | 2 | 2 доллара | |
| 623 подшипник с V-образной канавкой | 5 | 5 долларов | В настоящее время Hangprinter (версия 2) их не использует, но они пригодятся, если вы когда-нибудь захотите снизить производительность принтера, например, использовать более легкие шаговые двигатели. |
| подшипник 608 | 4 | 2 доллара | |
| Радиочастотный модуль Bluetooth-трансивера JY-MCU | 1 | 6 долларов | Используется, как описано здесь |
| Преобразователь переменного тока 220 В в 12 В (блок питания), обеспечивающий ток силой около 15 А или более (то есть мощность 180 Вт или более). | 1 | 16 долларов | Более высокое напряжение обеспечит лучшую производительность шагового двигателя. Перед повышением напряжения см. здесь . |
| Деталь для удочки с внутренним диаметром глаз 2,7 мм | 9 | 9 долларов | |
| Зубчатая передача | 2 | 4 доллара | В прототипе используется E3D Hobb-Goblin с внутренним диаметром 5 мм. Если вы используете шестерни другого размера, отрегулируйте Hobbed_insert_diameterих соответствующим Hobbed_insert_heightобразом measured_numbers.scad. |
| Набор винтов М3, гаек и гаек Nyloc | 1 | 5 долларов | Ориентировочная цена. Винты и гайки часто продаются в больших количествах, поэтому инвестиции могут быть больше. |
| Метры неэластичной рыболовной лески (дайнема) | 15 | 1 доллар | Леска всегда продается в больших количествах, поэтому инвестиции будут больше. |
| Крюки для точек крепления | 9 | 5 долларов | Подойдетлюбой простой прием вроде ссылки на изображение ... |
| Материалы для печати и электроэнергия для 3D-печатных деталей | 1 | 10 долларов | Печатные материалы продаются только большими партиями, поэтому инвестиции составят не менее 30 долларов США. |
| Общая стоимость | 250 долларов | ||
Трудности
- Сохраняя небольшие обороты, несмотря на силы, исходящие от
- Кабель питания
- Нить накала
- Ускоряющие двигатели
- Не допускайте попадания нити накала и кабеля питания в шестерни, печатную плату и (снаружи) горячего конца.
- Достаточно точная конфигурация прошивки для поддержания плотности линий во всем объеме печати
- Надежное и повторяемое определение исходного положения
Домашняя позиция
Если бы был добавлен блок IMU (акселерометр + гироскоп), это мог бы быть единственный необходимый датчик. Наведение можно было бы реализовать следующим образом:
- Если принтер не горизонтален, затяните D-образные линии до упора.
- Опускайте принтер (выдвигая D-линии) до тех пор, пока горячий конец не коснется поверхности печати.
- Установите длину D. Ось D теперь откалибрована.
- Расширить D-линии еще на 2 мм
- Пока не горизонтально:
- Рассчитать направление наклона
- Затяните A, B или C, чтобы противодействовать наклону
- Затянуть D-линии на 2 мм
- Теперь мы в исходном положении, все оси откалиброваны.
Идея автоматической компенсации провисания линии
Блок IMU может использоваться во время печати следующим образом:
- Вычислить некоторую величину, описывающую «ожидаемый рывок» из gcode (Marlin и другие прошивки уже делают это. В Marlin значение будет спрятано в структуре block_t)
- Используйте IMU для записи «наблюдаемого рывка» (снова запихивая его в block_t в Marlin)
- Напишите функцию
F(expected jerk, observed jerk)→Move_to_tighten_stringsи вызывайте ее время от времени.
Поскольку недорогие 6-осевые инерциальные измерительные блоки (IMU) действительно хорошо регистрируют вращение, я ожидаю, что понятие «рывка» будет включать в себя вращение (при этом ожидаемое вращение всегда равно 0). Синхронизация будет очень важна, но в Hangprinter-Marlin уже есть пять nopопераций в середине кода пошагового управления (см. функцию «рабочая лошадка» в [ссылка stepper.cpp]), которые можно использовать для считывания показаний IMU в точно заданные моменты времени. nopВ любом случае, s нужны только для ожидания микросхем драйвера шагового двигателя drv8825.
Спасибо Dejay с forums.reprap.org за указание на возможность существования подобного механизма.
Следующие шаги
- Добавление дешевого блока IMU, например MPU-6050
- Создание уменьшенной версии Clerck с использованием двигателей Nema14 для снижения массы и стоимости
- Снимите двигатели с головки экструдера и установите их на опоры для уменьшения массы.
ссылки
- ↑ http://reprap.org/wiki/Росток
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots
| Авторы | Торбьёрн Людвигсен |
|---|---|
| Лицензия | CC-BY-SA-3.0 |
| Цитировать как | Торбьёрн Людвигсен (2015–2025 гг.). «Клерк, 3D-принтер RepRap, свисающий с потолка» . Аппропедия . Проверено 21 октября 2025 г. |