
Clerck, a RepRap 3D printer hanging from the ceiling/it

Una stampante 3D RepRap appesa al soffitto.
Il progetto RepRap ha mostrato per la prima volta al mondo la stampa 3D economica su piccola scala nel 2006. Il loro design non era intenzionalmente ben pensato. L’idea era che una stampante 3D in grado di stampare le proprie parti sarebbe stata migliorata attraverso l’evoluzione come le iterazioni, indipendentemente dalla qualità del primo progetto. Ciò si è rivelato del tutto corretto, poiché una grande comunità è cresciuta rapidamente attorno ai primi progetti RepRap. Gli utenti RepRap hanno iniziato a sperimentare e remixare tutte le parti della stampante, incluso il suo sistema di coordinate cartesiane.
Contenuti
File sorgenti e documentazione esterna
| Codice sorgente: | attualmente sul repository Gitlab , in precedenza sul repository Github | [1] collegamento rapido al firmware |
| Licenze: | Il repository ha GPLv2, il blog utilizza la Gnu Free Documentation License, i video Vimeo hanno la licenza CC-BY | Segue le raccomandazioni della FSF |
| Processo di creazione: | Post del blog [2] , [3] , [4] , [5] , [6] , [7] , [8] , [9] , [10] , [11] , [12] , [ 13] , [14] , [15] , [16] | video e immagini, molto dettagliati |
| Filo di sviluppo: | Forum RepRap Hangprinter , vedere anche il thread di lancio del progetto originale | |
| Pagina Wiki: | su reprap.org | obsoleto |
| Tutti i video: | Utente Vimeo 23166500 | |
| Pagina web del progetto: | hangprinter.org |
Comprendere il mercato
I primi progetti di stampanti 3D non cartesiane furono la Tripod-Repstrap (2007) e i suoi successori geometricamente simili Rostock (2012) [1] e Lisa Simpson (2013). [2] [3] Altri progetti RepRap non cartesiani includono GUS Simpson (2013), [4] Morgan (2013), [5] Wally (2013) [6] e Feather (2013). [7]
Tutte queste stampanti cercano di barattare i calcoli geometrici più pesanti con l'eliminazione dei requisiti hardware o delle fasi di costruzione che richiedono molto tempo. Hanno tutti frame e ci sono ancora cicli di clock di riserva nelle loro CPU Arduino. L'idea dell'Hangprinter è quella di evitare del tutto il rigido telaio personalizzato e di affidarsi invece a collegamenti via cavo a strutture rigide già costruite, come gli interni delle case. Questo progetto rientra nella categoria più generale dei robot via cavo ( vedi collegamento Wikipedia ).
Realizzare questo lavoro porterebbe a volumi di stampa potenzialmente enormi per prezzi fino a circa 300 dollari. I prezzi dei concorrenti sono:
| Nome | Prezzo | Stampa il volume |
|---|---|---|
| Grande rappresentante | circa $ 40.000 [8] | 1 m3 |
| GigabotXL | circa $ 13.000 [9] | 0,27 m3 |
| X1000 | circa $ 16.000 [10] | 0,48 m3 |
Altre stampanti sperimentali su larga scala includono la Big Delta Printer della Wasp [11] e la KamerMaker, un modello cartesiano ingrandito. [12] Altre soluzioni sperimentali per la stampa su larga scala includono la sostituzione del telaio con funzionalità di tracciamento della linea e un veicolo di supporto, come i Minibuilder. [13]
I concorrenti presentati sono molto costosi e poco riproducibili, molti di loro non sono nemmeno hardware di progettazione gratuita. Non soddisfano le esigenze, ad esempio, del progetto Open Source Ecology, che vuole stampare componenti strutturali in plastica come pannelli di carrozzeria e torri di redworm con strumenti OSHW.
Obiettivi del progetto
Nuovi obiettivi di progettazione del progetto nella versione 4 (2018)
- Un cavallo di battaglia affidabile
- che le persone apprezzeranno utilizzare
- e diffondersi
- a scopo di lucro
Obiettivo finale dichiarato nel 2018: diventare una macchina di produzione universale (UMM)
Obiettivi iniziali del progetto
- Conteggio delle parti basso
- Facile da stampare, assemblare, installare e distribuire
- Enorme volume di costruzione
- Economico
- In grado di stampare molte delle proprie parti
Progetto
Il creatore e la comunità stanno lavorando alla versione 4 a settembre 2018. Vedi i nuovi obiettivi di progettazione dal blog di Tobben
Considerazioni progettuali per la prima versione
- Metti tutto l'hardware (eccetto il convertitore AC/DC) in un'unica unità.
- Un solo vettore di forza verso l'alto, compensato con contrappeso.
- L'eccessivo vincolo consente una compensazione flessibile delle linee allentate.
- Quando la stampante è inattiva, è possibile ritrarre tutte le corde. Consente soluzioni di archiviazione eleganti. Potrebbe renderlo popolare nelle grandi città, dove gli spazi interni sono scarsi.
- Linee parallele collegate a bobine comuni per impedire la rotazione.

Il primo schizzo della geometria di Hangprinters.
Le linee rette vengono suddivise in segmenti di linea dal firmware di Clerck. Questa è l'equazione che il firmware di Clerck deve risolvere per ciascun segmento di linea.
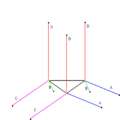
Denominazione degli assi della geometria di Clerck. Le linee parallele impediscono la rotazione. Il triangolo nero è Clerck. I punti neri sono chiamati punti di ancoraggio. I punti gialli sono chiamati punti azione.

Un rendering del file CAD di Clerck a novembre 2015.

Un Clerck stampato, montato e assemblato, ottobre 2015.





Video che mostra il progetto in azione
Costi
BMO aperto di Hangprinter versione 3 (con Mechaduino come controller motore a circuito chiuso)
!!OBBLIGATORIO!!
| Articolo | Qtà | Prezzo totale | Nota |
|---|---|---|---|
| E3D V6 Vulcano hot-end | 1 | $ 100 | Gentilmente sponsorizzato da E3d per lo sviluppo del prototipo. Grazie E3d! |
| Motore passo-passo Nema17 | 5 | $ 60 | Il prototipo utilizza 17HS4401N. Avvertenza: se utilizzi stepper di dimensioni diverse per l'asse dell'estrusore o per l'asse verticale, dovrai regolare i file CAD per adattarli al tuo motore. Le dimensioni 17HS4401N sono codificate nel file sorgentemeasured_numbers.scad |
| Arduino Mega | 1 | $ 10 | Acquista in set con RAMPE e driver passo-passo a prezzi più bassi |
| RAMPE | 1 | $ 5 | Il prototipo utilizza la versione 1.4 |
| drv8825 supporto per driver motore passo-passo (Pololu) | 5 | $ 10 | Il modello del driver passo-passo non è importante purché la corrente di uscita sia vicina alla corrente massima dello stepper (1,7 A per 17HS4401N) |
| 623 cuscinetto | 2 | $ 2 | |
| 623 cuscinetto con scanalatura a V | 5 | $ 5 | Attualmente, Hangprinter (versione 2) non li utilizza, ma è utile averli nel caso in cui si desideri ridurre la velocità della stampante, ad esempio per consentire motori passo-passo più leggeri. |
| 608 cuscinetto | 4 | $ 2 | |
| Modulo RF ricetrasmettitore Bluetooth JY-MCU | 1 | $ 6 | Usato come descritto qui |
| Convertitore da 220 V CA a 12 V (alimentatore) che fornisce circa 15 A o più (ovvero 180 W o più di potenza). | 1 | $ 16 | Una tensione più elevata fornirebbe prestazioni migliori dello stepper. Prima di aumentare la tensione, vedere qui . |
| Parte interna della canna da pesca con occhi da 2,7 mm | 9 | $ 9 | |
| Ingranaggio di trasmissione dentato | 2 | $ 4 | Il prototipo utilizza hobb-goblin E3D con diametro interno di 5 mm. Se si utilizzano ingranaggi conduttori di dimensioni diverse, regolare Hobbed_insert_diametere Hobbed_insert_heightdi measured_numbers.scadconseguenza. |
| Set di viti M3, dadi e dadi Nyloc | 1 | $ 5 | Prezzo stimato, viti e dadi vengono spesso venduti in quantità maggiori, quindi l'investimento potrebbe essere maggiore |
| Metri di filo da pesca non elastico (dynema) | 15 | $ 1 | La lenza viene sempre venduta in quantità maggiori, quindi l'investimento sarà maggiore |
| Ganci per punti di ancoraggio | 9 | $ 5 | Qualsiasi semplice hook come questo: link all'immagine ... andrà benissimo. |
| Materiale di stampa ed elettricità per parti di stampa 3D | 1 | $ 10 | Il materiale di stampa viene venduto solo in quantità maggiori, quindi l'investimento sarà di almeno circa $ 30 |
| Costo totale | $ 250 | ||
Le difficoltà
- Mantenere le rotazioni piccole, nonostante le forze
- Cavo di alimentazione
- Filamento
- Motori in accelerazione
- Mantenere il filamento e il cavo di alimentazione lontani dagli ingranaggi, dalla stampante e dall'estremità calda (all'esterno).
- Configurazione del firmware sufficientemente accurata per mantenere le linee strette in tutto il volume di stampa
- Trovare la posizione iniziale in modo affidabile e ripetibile
Posizione iniziale
Se fosse aggiunta un'unità IMU (accelerometro + giroscopio), questo potrebbe essere l'unico sensore necessario. L'homing potrebbe essere fatto in questo modo:
- Se la stampante non è orizzontale, stringere le linee D fino a quando non lo è
- Abbassare la stampante (estendere le linee D) finché l'estremità calda non si scontra con la superficie di stampa
- Imposta la lunghezza D. L'asse D è ora calibrato
- Estendere le linee D di altri 2 mm
- Anche se non orizzontale:
- Calcolare la direzione di inclinazione
- Stringere A, B o C per contrastare l'inclinazione
- Stringere le linee D di 2 mm
- Ora siamo nella posizione iniziale, tutti gli assi calibrati
Idea per la compensazione automatica della linea allentata
Un'unità IMU può essere utilizzata durante la stampa nel modo seguente:
- Calcola una quantità che descrive il "jerk previsto" dal gcode (Marlin e altri firmware lo fanno già. In Marlin il valore verrebbe inserito nella struttura block_t)
- Usa IMU per registrare il "coglione osservato" (inserindolo nuovamente in block_t in Marlin)
- Scrivi una funzione
F(expected jerk, observed jerk)→Move_to_tighten_strings, e chiamala di tanto in tanto
Poiché le IMU a 6 assi economiche sono davvero buone nel registrare la rotazione, mi aspetto che la nozione di "strappo" includa la rotazione (con la rotazione prevista sempre 0). La tempistica sarà davvero importante, ma Hangprinter-Marlin ha già cinque nopoperazioni nel mezzo del codice passo-passo (vedere la funzione cavallo di battaglia in stepper.cpp), che potrebbero essere utilizzate per le letture IMU esattamente al momento giusto. Gli nops sono comunque lì solo per aspettare i chip del driver passo-passo drv8825.
Grazie a Dejay su forums.reprap.org per aver segnalato la possibilità di un meccanismo simile.
Prossimi passi
- Aggiunta di un'unità IMU economica come MPU-6050
- Costruire una versione più piccola di Clerck utilizzando motori Nema14 per massa e costi inferiori
- Togliere i motori dalla testa dell'estrusore e posizionarli sui supporti per ridurre la massa.
Riferimenti
- ↑ http://reprap.org/wiki/Rostock
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots