
Clerck, a RepRap 3D printer hanging from the ceiling/zh

天花板上懸掛著一台 RepRap 3D 列印機。
RepRap 計畫於 2006 年首次向世界展示了廉價的小型 3D 列印。這個想法是,無論第一個設計的品質如何,能夠列印自己零件的 3D 列印機都將透過迭代等進化得到改進。事實證明這是非常正確的,因為一個大型社區圍繞著最初的幾個 RepRap 設計迅速發展起來。 RepRap 使用者開始試驗和重新混合印表機的所有零件,包括其笛卡爾座標系。
來源文件和外部文檔
| 原始碼: | 目前在Gitlab 儲存庫上,之前在Github 儲存庫上 | [1]韌體快速鏈接 |
| 許可證: | 該儲存庫具有 GPLv2,部落格使用 Gnu 自由文件許可證,Vimeo 影片已獲得 CC-BY 許可 | 遵循 FSF 的建議 |
| 建置過程: | 部落格文章[2]、[3]、[4]、[5]、[6]、[7]、[8]、[9]、[10]、 [11 ]、[12]、[13]、[14]、[15]、[16] | 影片和圖片,非常詳細 |
| 開發線程: | RepRap Hangprinter 論壇,另請參閱原始專案啟動線程 | |
| 維基頁面: | 在 rerap.org | 過時的 |
| 所有影片: | 維梅奧用戶 23166500 | |
| 專案網頁: | hangprinter.org |
了解市場
早期的非笛卡爾 3D 列印機設計包括 Tripod-Repstrap (2007) 及其幾何相似的後繼產品 Rostock (2012) [1]和 Lisa Simpson (2013)。[2] [3]其他非笛卡爾 RepRap 設計包括 GUS Simpson (2013)、[4] Morgan (2013)、[5] Wally (2013) [6]和 Feather (2013)。[7]
所有這些印表機都試圖用更繁重的幾何計算來擺脫硬體需求或耗時的建置步驟。它們都有框架,而且 Arduino CPU 中仍然有空閒時脈週期。 Hangprinter 的想法是完全跳過硬定制框架,而是依靠電線連接到已建成的剛性結構,例如房屋內部。這種設計屬於更一般的電纜機器人類別(請參閱維基百科連結)。
完成這項工作將帶來潛在的巨大印刷量,而價格將降至 300 美元左右。競爭對手的價格是:
| 姓名 | 價格 | 列印量 |
|---|---|---|
| 大代表 | 約 4 萬美元[8] | 1米3 |
| 超級機器人XL | 約 13,000 美元[9] | 0.27米3 |
| X1000 | 約 16,000 美元[10] | 0.48米3 |
其他大型實驗印表機包括 Wasp 的 Big Delta 印表機[11]和 KamerMaker(一種放大的笛卡爾設計)。[12]用於大規模列印的其他實驗性解決方案包括用線追蹤功能和支援車輛替換框架,例如 Minibuilders。[13]
所提供的競爭對手非常昂貴,並且不能自我複製,其中許多甚至不是免費設計的硬體。它們無法滿足開源生態專案等的需求,該專案希望使用 OSHW 工具列印車身面板和紅蟲塔等結構塑膠零件。
專案目標
第 4 版(2018 年)的新專案設計目標
- 可靠的主力
- 人們會喜歡使用
- 並傳播
- 以營利為目的
2018 年提出的最終目標:成為通用製造機器 (UMM)
初始專案目標
- 零件數量少
- 易於列印、組裝、安裝和分發
- 巨大的建造體積
- 便宜的
- 能夠列印許多自己的零件
設計
創作者和社群正在 2018 年 9 月開發版本 4 。
第一個版本的設計注意事項
- 將所有硬體(AC/DC 轉換器除外)放在一個單元中。
- 只有一個向上的力向量,透過配重來補償。
- 過度約束允許靈活補償鬆弛線。
- 當印表機空閒時,可以收回所有的線。實現優雅的儲存解決方案。可以使其在室內空間稀缺的大城市中流行。
- 平行線連接到公共線軸以防止旋轉。

Hangprinters 幾何的第一個草圖。
Clerck 的韌體將直線切割成線段。這是 Clerck 韌體需要為每個線段求解的方程式。
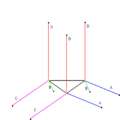
克萊克幾何軸的命名。平行線可防止旋轉。黑色三角形是克拉克。黑點稱為錨點。黃點稱為行動點。

截至 2015 年 11 月的 Clerck CAD 檔案渲染圖。

印刷、安裝和組裝的 Clerck,2015 年 10 月。





影片展示了實際設計
成本
Hangprinter 版本 3 的開放 BMO(使用 Mechaduinos 作為閉環馬達控制器)
!
| 物品 | 數量 | 總價 | 筆記 |
|---|---|---|---|
| E3D V6 火山熱端 | 1 | 100 美元 | 由 E3d 贊助原型開發。謝謝E3d! |
| Nema17步進電機 | 5 | 60 美元 | 原型採用17HS4401N。警告:如果您對擠出機軸或垂直軸使用其他尺寸的步進器,則需要調整 CAD 檔案以符合您的馬達。 17HS4401N 尺寸編碼到原始檔中measured_numbers.scad |
| Arduino Mega | 1 | 10 美元 | 與 RAMPS 和步進驅動器一起購買,價格更低 |
| 斜坡道 | 1 | 5 美元 | 原型使用v1.4 |
| drv8825步進馬達驅動器載具(Pololu) | 5 | 10 美元 | 只要輸出電流接近步進器最大電流(17HS4401N 為 1.7 A),步進驅動器的型號並不重要 |
| 623軸承 | 2 | 2 美元 | |
| 623軸承V型槽 | 5 | 5 美元 | 目前,Hangprinter(版本 2)不使用這些,但如果您想要降低印表機的速度,例如允許使用更輕的步進電機,那麼擁有它們就很好了。 |
| 608軸承 | 4 | 2 美元 | |
| JY-MCU藍牙收發射頻模組 | 1 | 6 美元 | 按照此處所述使用 |
| 220V AC 至 12V 轉換器(電源)可提供約 15 A 或更高電流(即 180 W 或更高功率)。 | 1 | 16 美元 | 更高的電壓將提供更好的步進性能。在增加電壓之前,請參閱此處。 |
| 2.7 毫米內眼魚竿零件 | 9 | 9 美元 | |
| 滾齒驅動齒輪 | 2 | 4 美元 | 原型使用 E3D hobb-goblin 5 毫米內徑。如果您使用不同尺寸的驅動齒輪,請相應調整Hobbed_insert_diameter和。Hobbed_insert_heightmeasured_numbers.scad |
| M3 螺絲、螺帽和尼龍螺母套裝 | 1 | 5 美元 | 預估價格,螺絲和螺帽往往銷售量較大,因此投資可能較大 |
| 米長非彈性釣魚線(迪尼瑪) | 15 | 1 美元 | 魚線總是銷量較大,所以投資也會較大 |
| 錨點掛鉤 | 9 | 5 美元 | 任何像這樣的簡單鉤子:連結到圖像...都可以。 |
| 3D列印零件的列印材料和電力 | 1 | 10 美元 | 印刷材料僅大量出售,因此投資至少 30 美元 |
| 總成本 | 250 美元 | ||
困難
- 儘管有來自外部的力量,但仍保持較小的旋轉
- 電源線
- 燈絲
- 加速馬達
- 保持燈絲和電源線遠離齒輪、列印件和熱端(外部)。
- 足夠準確的韌體配置可在整個列印量中保持線路緊湊
- 可靠且可重複地找到起始位置
起始位置
如果添加 IMU 單元(加速度計 + 陀螺儀),這可能是唯一需要的感測器。歸位可以這樣完成:
- 如果印表機不水平,請擰緊 D 線,直到其水平
- 降低印表機(延長 D 線)直到熱端撞到列印表面
- 設定 D 長度。 D 軸現已校準
- 將 D 線再延長 2 毫米
- 雖然不是水平的:
- 計算傾斜方向
- 擰緊 A、B 或 C 以抵消傾斜
- 將 D 線旋緊 2 mm
- 我們現在處於原始位置,所有軸均已校準
自動鬆弛線補償概念
IMU 單元可在列印過程中以以下方式使用:
- 從 gcode 計算一些描述「預期混蛋」的數量(Marlin 和其他韌體已經這樣做了。在 Marlin 中,該值將被塞進 block_t 結構中)
- 使用 IMU 記錄「觀察到的混蛋」(再次將其塞入 Marlin 中的 block_t 中)
- 寫一個函數
F(expected jerk, observed jerk)→Move_to_tighten_strings,並偶爾呼叫它
由於廉價的 6 軸 IMU 確實擅長記錄旋轉,因此我希望「加加速度」的概念包括旋轉(預期旋轉始終為 0)。計時確實很重要,但 Hangprinter-Marlin 已經nop在步進程式碼中間有五個操作(請參閱 中的主力函數stepper.cpp),可以在正確的時間將其用於 IMU 讀數。無論如何, snop只是等待 drv8825 步進驅動器晶片。
感謝forums.reprap.org 上的 Dejay指出了類似機制的可能性。
下一步
- 添加廉價的 IMU 單元,如 MPU-6050
- 使用 Nema14 馬達建造較小版本的 Clerck,以降低品質和成本
- 將馬達從擠出機頭上取下並安裝到支架上以減輕品質。
參考
- ^ http://reprap.org/wiki/Rostock
- ^ http://reprap.org/wiki/LISA_Simpson
- ^ http://forums.reprap.org/read.php?178,267835
- ^ http://reprap.org/wiki/GUS_Simpson
- ^ http://reprap.org/wiki/RepRap_Morgan
- ^ http://reprap.org/wiki/Wally
- ^ http://forums.reprap.org/read.php?1,214837,214859
- ^ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ^ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ^ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ^ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potial-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots