
Clerck, a RepRap 3D printer hanging from the ceiling/fa

یک چاپگر سه بعدی RepRap که از سقف آویزان شده است.
پروژه RepRap برای اولین بار در سال 2006 پرینت سه بعدی در مقیاس کوچک ارزان را به جهانیان نشان داد. طراحی آنها عمداً چندان خوب فکر نشده بود. ایده این بود که یک چاپگر سه بعدی که می تواند قطعات خود را چاپ کند، بدون توجه به کیفیت طرح اول، از طریق تکامل مانند تکرار بهبود می یابد. این کاملاً صحیح بود، زیرا جامعه بزرگی به سرعت در اطراف چند طرح اول RepRap رشد کرد. کاربران RepRap شروع به آزمایش و مخلوط کردن مجدد تمام قسمت های چاپگر، از جمله سیستم مختصات دکارتی آن کردند.
فایل های منابع و اسناد خارجی
| کد منبع: | در حال حاضر در مخزن Gitlab ، قبلا در مخزن Github | [1] پیوند سریع به سیستم عامل |
| مجوزها: | مخزن دارای GPLv2 است، وبلاگ از مجوز مستندات رایگان Gnu استفاده می کند، ویدیوهای Vimeo دارای مجوز CC-BY هستند. | از توصیه های FSF پیروی می کند |
| فرآیند ساخت: | پست های وبلاگ [2] ، [3] ، [4] ، [5] ، [6 ] ، [ 7] ، [8] ، [9] ، [10] ، [11] ، [12] ، [13] ، [14] ، [15] ، [16] | فیلم ها و تصاویر، بسیار دقیق |
| موضوع توسعه: | انجمن RepRap Hangprinter ، همچنین به موضوع راه اندازی پروژه اصلی مراجعه کنید | |
| صفحه ویکی: | در reprap.org | منسوخ شده |
| همه ویدیوها: | کاربر Vimeo 23166500 | |
| وب سایت پروژه: | hangprinter.org |
شناخت بازار
طرحهای اولیه چاپگرهای سه بعدی غیر دکارتی Tripod-Repstrap (2007) و جانشینان مشابه هندسی آن Rostock (2012) [ 1 ] و Lisa Simpson (2013) بودند. [ 2 ] [ 3 ] دیگر طرح های RepRap غیر کارتزی شامل GUS Simpson (2013)، [ 4 ] Morgan (2013)، [ 5 ] Wally (2013) [ 6 ] و Feather (2013) هستند. [ 7 ]
همه این چاپگرها سعی میکنند محاسبات هندسی سنگینتری را برای خلاص شدن از شر نیازهای سختافزاری یا مراحل ساخت زمانبر مبادله کنند. همه آنها فریم دارند و هنوز چرخه های ساعت اضافی در پردازنده های آردوینو آنها باقی مانده است. ایده Hangprinter این است که به طور کلی از قاب سفارشی سخت صرف نظر کنید و در عوض به اتصالات سیمی به سازه های سفت و سخت از قبل ساخته شده مانند داخل خانه ها تکیه کنید. این طرح در دسته کلی تر ربات های کابلی قرار می گیرد ( پیوند ویکی پدیا را ببینید ).
ساخت این اثر میتواند به حجم چاپ بالقوه عظیمی با قیمتهای کمتر از 300 دلار منجر شود. قیمت رقبا عبارتند از:
| نام | قیمت | حجم چاپ |
|---|---|---|
| نماینده بزرگ | حدود 40000 دلار [ 8 ] | 1 متر 3 |
| Gigabot XL | حدود 13000 دلار [ 9 ] | 0.27 متر 3 |
| X1000 | حدود 16000 دلار [ 10 ] | 0.48 متر 3 |
دیگر چاپگرهای آزمایشی در مقیاس بزرگ عبارتند از Wasp's Big Delta Printer [ 11 ] و KamerMaker، یک طرح دکارتی کوچک شده. [ 12 ] راه حل های آزمایشی دیگر برای چاپ در مقیاس بزرگ شامل جایگزینی قاب با قابلیت های ردیابی خط و یک وسیله نقلیه پشتیبانی مانند Minibuilders است. [ 13 ]
رقبای ارائه شده بسیار گران هستند و خیلی خود تولید نمی شوند، بسیاری از آنها حتی سخت افزار طراحی رایگان نیستند. آنها نیازهای پروژه اکولوژی منبع باز را برآورده نمی کنند، که می خواهد اجزای پلاستیکی ساختاری مانند پانل های بدنه خودرو و برج های کرم قرمز را با ابزار OSHW چاپ کند.
اهداف پروژه
اهداف طراحی پروژه جدید در نسخه 4 (2018)
- یک اسب کار قابل اعتماد
- که مردم از استفاده از آن لذت خواهند برد
- و گسترش می یابد
- برای سود
هدف نهایی اعلام شده در سال 2018: تبدیل شدن به یک ماشین تولید جهانی (UMM)
اهداف اولیه پروژه
- تعداد قطعات کم
- چاپ، مونتاژ، نصب و توزیع آسان
- حجم ساخت بسیار زیاد
- ارزان
- می تواند بسیاری از قطعات خود را چاپ کند
طراحی
سازنده و انجمن در سپتامبر 2018 روی نسخه 4 کار می کنند. اهداف طراحی جدید را از وبلاگ توبن ببینید
ملاحظات طراحی برای نسخه اول
- تمام سخت افزارها (به جز مبدل AC/DC) را در یک واحد قرار دهید.
- فقط یک بردار نیرو به سمت بالا، با وزن شمارنده جبران می شود.
- محدودیت بیش از حد امکان جبران انعطاف پذیر خطوط شل را فراهم می کند.
- هنگامی که چاپگر بیکار است، می توان تمام رشته ها را پس گرفت. راه حل های ذخیره سازی ظریف را فعال می کند. می تواند آن را در شهرهای بزرگ که فضای داخلی کمیاب است محبوب کند.
- خطوط موازی برای جلوگیری از چرخش به قرقره های معمولی متصل می شوند.
 اولین طرح هندسه Hangprinters.
اولین طرح هندسه Hangprinters. خطوط مستقیم توسط سیستم عامل Clerck به بخش های خط تقسیم می شوند. این معادله ای است که سیستم عامل Clerck باید برای هر بخش خط حل کند.
خطوط مستقیم توسط سیستم عامل Clerck به بخش های خط تقسیم می شوند. این معادله ای است که سیستم عامل Clerck باید برای هر بخش خط حل کند.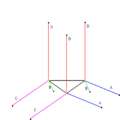 نامگذاری محورهای هندسه کلرک. خطوط موازی از چرخش جلوگیری می کند. مثلث سیاه Clerck است. نقاط سیاه را نقاط لنگر می گویند. نقاط زرد را نقاط عمل می نامند.
نامگذاری محورهای هندسه کلرک. خطوط موازی از چرخش جلوگیری می کند. مثلث سیاه Clerck است. نقاط سیاه را نقاط لنگر می گویند. نقاط زرد را نقاط عمل می نامند. رندر فایل CAD Clerck در نوامبر 2015.
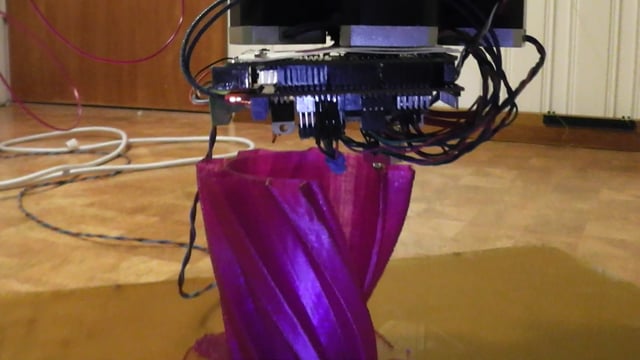
رندر فایل CAD Clerck در نوامبر 2015. Clerck چاپ، نصب و مونتاژ، اکتبر 2015.
Clerck چاپ، نصب و مونتاژ، اکتبر 2015.





ویدئویی که طرح را در عمل نشان می دهد
هزینه ها
باز کردن BMO Hangprinter نسخه 3 (با Mechaduinos به عنوان کنترل کننده موتور حلقه بسته)
!!منسوخ شده!!
| مورد | تعداد | قیمت کل | توجه داشته باشید |
|---|---|---|---|
| E3D V6 آتشفشان داغ | 1 | 100 دلار | لطفا توسط E3d برای توسعه نمونه اولیه حمایت شود. با تشکر E3d! |
| موتور پله ای نما17 | 5 | 60 دلار | نمونه اولیه از 17HS4401N استفاده می کند. هشدار: اگر از استپرهایی با اندازه دیگری برای محور اکسترودر یا محور عمودی استفاده میکنید، باید فایلهای CAD را مطابق با موتور خود تنظیم کنید. ابعاد 17HS4401N در فایل منبع کدگذاری شده استmeasured_numbers.scad |
| آردوینو مگا | 1 | 10 دلار | با درایورهای RAMPS و پلهای با قیمتهای پایینتر خرید کنید |
| رمپ | 1 | 5 دلار | نمونه اولیه از نسخه 1.4 استفاده می کند |
| حامل درایور موتور پله ای drv8825 (Pololu) | 5 | 10 دلار | تا زمانی که جریان خروجی نزدیک به حداکثر جریان پله ای (1.7 آمپر برای 17HS4401N) باشد، مدل درایور استپر مهم نیست. |
| بلبرینگ 623 | 2 | 2 دلار | |
| 623 بلبرینگ شیار V | 5 | 5 دلار | در حال حاضر، Hangprinter (نسخه 2) از اینها استفاده نمی کند، اما اگر بخواهید چاپگر خود را تنظیم کنید، به عنوان مثال برای استفاده از موتورهای پله ای سبک تر، خوب هستند. |
| بلبرینگ 608 | 4 | 2 دلار | |
| ماژول RF فرستنده گیرنده بلوتوث JY-MCU | 1 | 6 دلار | همانطور که در اینجا توضیح داده شده استفاده می شود |
| مبدل 220 ولت AC به 12 ولت (منبع تغذیه) که حدود 15 آمپر یا بیشتر (یعنی 180 وات یا بیشتر توان) می دهد. | 1 | 16 دلار | ولتاژ بالاتر عملکرد پله ای بهتری را ارائه می دهد. قبل از افزایش ولتاژ، اینجا را ببینید . |
| چشم های 2.7 میلی متری داخل قطعه میله ماهیگیری دیا | 9 | 9 دلار | |
| دنده محرک هوبدار | 2 | 4 دلار | نمونه اولیه از E3D hobb-goblin ID 5 میلی متری استفاده می کند. اگر از چرخ دنده های محرک با اندازه های مختلف استفاده می کنید، متناسب Hobbed_insert_diameterبا آن تنظیم کنید .Hobbed_insert_heightmeasured_numbers.scad |
| ست پیچ M3، مهره و مهره نایلوک | 1 | 5 دلار | قیمت تخمینی، پیچ ها و مهره ها اغلب در مقادیر بیشتر فروخته می شوند، بنابراین سرمایه گذاری ممکن است بزرگتر باشد. |
| متر خط ماهیگیری غیر الاستیک (دینما) | 15 | 1 دلار | خط ماهیگیری همیشه در مقادیر بیشتر فروخته می شود، بنابراین سرمایه گذاری بیشتر خواهد بود |
| قلاب برای نقاط لنگر | 9 | 5 دلار | هر قلاب ساده ای مانند این: پیوند به تصویر ... به خوبی انجام می شود. |
| مواد چاپ و برق برای قطعات پرینت سه بعدی | 1 | 10 دلار | مواد چاپی فقط در مقادیر بیشتر فروخته می شود، بنابراین سرمایه گذاری حداقل حدود 30 دلار خواهد بود |
| هزینه کل | 250 دلار | ||
مشکلات
- کوچک نگه داشتن چرخش ها، علیرغم نیروهای وارده
- کابل برق
- رشته
- موتورهای شتاب دهنده
- حفظ فیلامنت و کابل برق از چرخ دنده ها، چاپ و (خارج از) انتهای داغ.
- پیکربندی سفتافزار به اندازه کافی دقیق است تا خطوط را در طول حجم چاپ محکم نگه دارد
- یافتن موقعیت خانه به طور قابل اعتماد و تکراری
موقعیت خانه
اگر یک واحد IMU (شتاب سنج + ژیروسکوپ) اضافه شود، این ممکن است تنها حسگر مورد نیاز باشد. هومینگ می تواند به این صورت انجام شود:
- اگر چاپگر افقی نیست، خطوط D را سفت کنید تا درست شود
- چاپگر را پایین بیاورید (خطوط D) را تا زمانی که قسمت داغ در سطح چاپ سقوط کند
- تنظیم D-length. محور D اکنون کالیبره شده است
- خطوط D را 2 میلی متر دیگر گسترش دهید
- در حالی که افقی نیست:
- محاسبه جهت شیب
- A، B یا C را سفت کنید تا شیب را خنثی کنید
- خطوط D را 2 میلی متر سفت کنید
- ما اکنون در موقعیت خانه هستیم، همه محورها کالیبره شده اند
ایده جبران خودکار خط شل
یک واحد IMU را می توان در حین چاپ به روش زیر استفاده کرد:
- مقداری را محاسبه کنید که "تحرک مورد انتظار" را از gcode توصیف می کند (مارلین و سایر سیستم عامل ها قبلاً این کار را انجام می دهند. در مارلین مقدار در ساختار block_t جمع می شود)
- از IMU برای ضبط "تحرک مشاهده شده" استفاده کنید (دوباره آن را در block_t در مارلین قرار دهید)
- یک تابع
F(expected jerk, observed jerk)→ بنویسیدMove_to_tighten_stringsو هر چند وقت یکبار آن را فراخوانی کنید
از آنجایی که IMUهای 6 محوره ارزان واقعاً در ضبط چرخش خوب هستند، انتظار دارم که مفهوم "جهش" شامل چرخش باشد (با چرخش مورد انتظار همیشه 0). زمانبندی بسیار مهم خواهد بود، اما Hangprinter-Marlin در حال حاضر پنج nopعملیات در وسط کد پلهای دارد (به تابع workhorse در stepper.cpp) مراجعه کنید، که میتواند برای خواندن IMU دقیقاً در زمانهای مناسب مورد استفاده قرار گیرد. به هر حال، s nopفقط منتظر تراشه های درایور استپر drv8825 هستند.
با تشکر از Dejay در forums.reprap.org برای اشاره به امکان مکانیزم مشابه.
مراحل بعدی
- اضافه کردن واحد IMU ارزان مانند MPU-6050
- ساخت یک نسخه کوچکتر از Clerck با استفاده از موتورهای Nema14 برای جرم و هزینه کمتر
- موتورها را از سر اکسترودر خارج کرده و روی تکیه گاه ها بردارید تا جرم کمتر شود.
منابع
- ↑ http://reprap.org/wiki/Rostock
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots