▼This page is an automatic translation to Vietnamese of OS Rheometer (from MIT):FAST.This translation is distributed in the hope that it will be useful, but without any guarantee of accuracy.
▼Nhóm nghiên cứu Công nghệ bền vững phù hợp miễn phí (FAST) của Đại học Western
Máy đo độ nhớt mã nguồn mở này có thể được sử dụng để so sánh định tính độ nhớt của các vật liệu khác nhau. Những cải tiến được ghi chú trên trang này cho phép tùy chỉnh thiết bị để phù hợp với những hạn chế của các dự án nghiên cứu khác nhau tại FAST.
Yêu cầu đào tạo an toàn
Chuyến tham quan Phòng thí nghiệm An toàn của Tiến sĩ Pearce
Thiết bị bảo hộ cá nhân (PPE) giúp bảo vệ sự an toàn của BẠN để bạn có thể tiếp tục làm những điều mình muốn.
Kính bảo hộ – luôn luôn cần thiết
Cần sử dụng găng tay đạt tiêu chuẩn khi xử lý các chất, vật liệu và hỗn hợp đang được thử nghiệm.
SDS và các chất khác
Việc biết rõ các loại hóa chất có trong phòng thí nghiệm và cách chúng tương tác với nhau là vô cùng quan trọng khi xảy ra tai nạn.
Nên xem các bảng dữ liệu an toàn hóa chất (SDS) thích hợp trực tuyến.
Hãy lưu ý các mối nguy hiểm được ghi trên cửa phòng thí nghiệm. Nếu bạn đưa bất kỳ thiết bị hoặc vật liệu mới nào vào, bạn phải xin phép người chịu trách nhiệm được ghi trên cửa phòng thí nghiệm. Nếu thông tin người chịu trách nhiệm đã lỗi thời, hãy liên hệ với ban quản lý bộ phận để cập nhật.
Thiết kế ban đầu do Makita Erni và Crystal E. Owens thuộc Khoa Kỹ thuật Cơ khí tại Viện Công nghệ Massachusetts (MIT) thực hiện.
Đối với các phép đo độ nhớt định lượng, thiết bị có khả năng đo trong khoảng 0,1-10 Pa.s với độ biến thiên từ 20-43%.
Cách thức hoạt động
Chiếc cốc được đổ đầy chất lỏng cần kiểm tra, và trong mỗi lần thử nghiệm, chiếc cốc sẽ quay và tác động lực lên cảm biến lực với các mức lực khác nhau.
Cốc đo độ nhớt có thể xoay được là nhờ có một cánh khuấy đặt bên trong cốc, được gắn cố định vào một trục kim loại nối với một động cơ quay. Khi động cơ quay, sự quay này làm cho trục quay theo, và cánh khuấy sẽ trộn đều chất bên trong cốc. Trong quá trình động cơ hoạt động, tốc độ quay làm cho cốc hơi xoay theo chiều quay của động cơ (thuận chiều kim đồng hồ). Cốc được thiết kế với các khớp nối linh hoạt cho phép chuyển động này.
Cảm biến lực được hiệu chuẩn để đọc khối lượng tính bằng gam và giá trị này được chia cho 1000 để chuyển đổi sang đơn vị SI của lực (kg⋅m/s^2) trong các mẫu Excel (trên OSF). Bằng cách nhân khối lượng với gia tốc trọng trường (9,81 m/s^2), lực được đo.
Mômen xoắn là đại lượng tương đương về mặt quay của lực tuyến tính, và được xác định như sau: Mômen xoắn (N ⋅ m) = 𝑟 <binary data, 4 bytes> sinθ , trong đó 𝑟 là bán kính đòn bẩy giữa cốc đo độ nhớt và cảm biến lực, <binary data, 4 bytes> là lực tác dụng lên cảm biến lực và sin θ là góc giữa lực F và đòn bẩy của cảm biến lực. Đòn bẩy của cảm biến lực vuông góc trực tiếp với lực tác dụng lên nó, do đó sinθ = 1. Vì giá trị này bằng 1 nên nó không được thêm vào các phép tính mômen xoắn.
Arduino đang thu thập dữ liệu về khối lượng ở các tốc độ quay khác nhau mỗi phút (RPM). Trong Excel, giá trị RPM được nhân với 2π và chia cho 60 để得到 tốc độ quay tính bằng radian mỗi giây: Tốc độ quay = (2π/60) × RPM
Độ nhớt là thước đo khả năng chống lại lực của chất lỏng (Pa⋅s), ứng suất cắt là lực tác dụng, và tốc độ biến dạng cắt là tốc độ biến dạng được áp dụng: Độ nhớt = Ứng suất cắt / Tốc độ biến dạng cắt Ứng suất cắt = Mômen xoắn / [ 2𝜋 × (bán kính cánh quạt 2 ) × (chiều dài cánh quạt) × ( 1 + ((2 × bán kính cánh quạt) / (3 × chiều dài cánh quạt)) ) ] Tốc độ biến dạng cắt = [ 2 / ( 1 – (bán kính cánh quạt / bán kính cốc) 2 ) ] × Tốc độ quayĐối với thiết bị ban đầu, bán kính cánh quạt là 0,01m, chiều dài cánh quạt là 0,05m và bán kính cốc là 0,015m.
Khi đánh giá chất lỏng phi Newton, sự thay đổi về hành vi dòng chảy và độ nhớt phụ thuộc vào lực tác dụng. Mã kiểm thử Arduino cho thiết bị thu thập dữ liệu cảm biến lực khi vật liệu bị cắt ở các tốc độ 60 RPM, 40 RPM, 25 RPM, 16 RPM, 10 RPM, 4 RPM, 1 RPM, 0.6 RPM, 0.1 RPM, 0.04 RPM và 0.01 RPM.
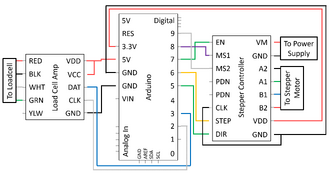
Nối dây thiết bị theo sơ đồ, sau đó làm theo các bước hiệu chuẩn và vận hành để chuẩn bị thiết bị cho việc sử dụng.
Sự định cỡ
Hiệu chuẩn cảm biến lực
Để hiệu chỉnh cảm biến lực, hãy kết nối bốn dây của cảm biến lực với bộ khuếch đại cảm biến lực, và để động cơ bước không được kết nối với cụm điện.
Tiếp theo, cần cố định cảm biến lực vào giá đỡ thử nghiệm cảm biến lực bằng hai lỗ không ren sao cho vít định vị đầu bi hướng lên trên và nhô ra khỏi giá đỡ thử nghiệm.
Cảm biến lực được hiệu chuẩn để đo khối lượng bằng cách treo các trọng lượng khác nhau lên đó và đọc dữ liệu đầu ra. Là một bộ phận có độ nhạy cao, các giá trị đo của cảm biến lực dao động quanh mức 0 với hệ số 1/3745 (hoặc ~0,000267022).
Hệ số hiệu chuẩn này đã được tích hợp vào mã Arduino. Cảm biến trọng lượng đã hiệu chuẩn sẽ đọc khối lượng của từng quả cân được treo lên nó sau khi được hiệu chuẩn.
Lắp ráp cảm biến lực với thiết bị.
Giờ đây, có thể lắp ráp cảm biến lực đã hiệu chuẩn với máy đo độ nhớt và cắm điện cho động cơ. Cốc đo độ nhớt được cố định vào đế gỗ và nằm ngang bằng với giá đỡ cảm biến lực để có thể tháo cốc ra giữa các lần thử nghiệm mà không cần chạm hoặc di chuyển cảm biến lực (nhằm giữ cho nó được hiệu chuẩn).
Khi cốc được cố định vào đế gỗ, tấm gương trên cần gạt của cảm biến lực phải tiếp xúc với vít điều chỉnh đầu bi trên cảm biến lực. Để điều chỉnh vít này, trước tiên hãy nới lỏng nó sao cho đầu bi nằm ngang bằng với cảm biến lực đã được hiệu chuẩn. Sau đó, gắn bộ phận cốc đo độ nhớt rỗng vào đế gỗ.
Bắt đầu siết chặt vít định vị cho đến khi đầu bi chạm vào tấm gương. Sau đó, siết chặt vít định vị thêm nửa vòng nữa để đảm bảo cốc luôn tiếp xúc với cảm biến lực trong suốt quá trình thử nghiệm.
Hiệu chuẩn Glycerin
Bạn có thể truy cập mã kiểm thử Arduino và các mẫu Excel dành cho thiết bị tại OSF.
Mở Arduino IDE và tải tệp “Code for RPM and Mass Reading” lên Arduino Uno. Mở mẫu bảng tính Excel để hiệu chuẩn glycerin.
Sử dụng công thức thực nghiệm để xác định độ nhớt của glycerin dựa trên nhiệt độ phòng hiện tại. Đối với thiết kế ban đầu của các bộ phận, cần 40mL vật liệu. Do đó, hãy nhập nhiệt độ phòng, để trống thể tích nước và nhập 0,04 cho thể tích glycerin (tính bằng lít). Nhấn tính toán và sau đó nhập giá trị độ nhớt động của hỗn hợp vào ô độ nhớt của glycerin trên Mẫu Excel hiệu chuẩn Glycerin. Lưu một bản sao của tệp để tiếp tục thử nghiệm.
Thêm 40mL glycerin nguyên chất 100%, mới và chưa sử dụng vào máy đo độ nhớt và làm theo quy trình chuẩn (SOP) bên dưới để hiệu chuẩn thiết bị. Toàn bộ thiết bị được kiểm tra bằng glycerin để xác định hệ số hiệu chuẩn cho các chỉ số của cảm biến lực. Lắp đặt giá đỡ động cơ và đảm bảo tất cả các dây dẫn được kết nối. Cắm Arduino vào.