
Control Board for Grilled Cheese Maker/es

| Tipo | Máquina para hacer queso a la parrilla |
|---|---|
| Autores | Nicolás Whisman |
| Ubicación | Houghton , Michigan |
| Estado | Desplegado |
| Años | 2021 |
| Costo | USD 15,3 |
La base de este proyecto fue un componente de un proyecto de equipo semestral en Michigan Tech para diseñar, desarrollar y probar un robot de nuestra propia imaginación. Nuestro equipo decidió crear un robot para preparar queso a la parrilla, y para ello se necesitó una placa de circuito para controlarlo.
El diseño eléctrico de la placa era simple: crear una placa capaz de controlar tres motores paso a paso independientes y un dispositivo de calentamiento resistivo, a la vez que admitía la entrada de datos, las posiciones mecánicas y las lecturas térmicas (para permitir un control de lazo cerrado). Esto se logró (y se logró) con bastante facilidad utilizando un microcontrolador con modulación por ancho de pulsos y algunas placas de expansión para el control de motores paso a paso.
Diseño
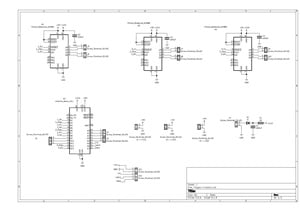
La imagen superior muestra el esquema final de la placa de control del Sr. Flipper, dividido en partes que detallan los requisitos de diseño. El diseño general fue el siguiente: Arduino Nano para el microcontrolador, ya que son robustos y fáciles de reemplazar. Conectadas a los pines PWM del Arduino Nano, hay tres placas controladoras de motor paso a paso Pololu A4988, que a su vez están conectadas a la alimentación y a algunos terminales de tornillo para su posterior conexión a los motores. Además, conectado al Nano mediante pines PWM, hay un juego de terminales de tornillo 3x1 destinado a ser los puntos de conexión para el dispositivo de calentamiento resistivo. Para garantizar el control de lazo cerrado, se crearon varios puntos de conexión que posteriormente se utilizarían como sensores de posición basados en potenciómetros para los motores paso a paso. Se incluye un circuito de alimentación para seguridad y distribución básicas. Finalmente, hay un juego de cinco terminales de tornillo conectados a "Clk, Latch, Data, +5V, GND". Este puerto está diseñado para ser un punto de conexión para un controlador de NES. El control humano fue una especificación para el diseño, y los controladores NES son bastante simplistas, por lo que se eligió un controlador NES como entrada de control por conveniencia y novedad.

La PCB final enrutada para la placa de control del Sr. Flipper se muestra arriba. Cabe destacar que esta placa se diseñó específicamente para ser de una sola capa para facilitar su creación y adquisición; en la práctica, las trazas de la capa superior que se muestran en la imagen se reemplazaron por una conexión de cable. Técnicamente, tener una placa de una sola capa no era una especificación de diseño obligatoria, pero se optó por fabricarla rápidamente en casa en lugar de subcontratarla.
Materiales y costos
La lista de materiales solo para esta placa (y el proyecto de clase en general) costó aproximadamente $63 dólares, pero considerando solo las piezas utilizadas en la placa, el costo se reduce a aproximadamente $15.30. El robot completo requirió gastos adicionales (es decir, los componentes mecánicos y las piezas auxiliares que no estaban a cargo del equipo eléctrico). La lista de materiales completa se muestra a continuación.

En total, este proyecto tomó aproximadamente 20 a 25 horas en completarse, desde los primeros conceptos hasta la soldadura.
Resultados del Proyecto Final

La imagen superior muestra el resultado final del trabajo del equipo: un robot automático para preparar sándwiches de queso a la plancha. La placa de circuito completa se puede ver apoyada en la base del dispositivo. Los tres motores paso a paso controlan conjuntamente la posición XY de la espátula y su rotación. El dispositivo puede recoger un sándwich de queso a la plancha sin terminar, colocarlo en el dispositivo de calentamiento resistivo (visible cerca de la parte superior), dejarlo hasta que esté perfectamente cocido y luego retirarlo del dispositivo para ofrecerlo al consumidor.
| Autores | |
|---|---|
| Licencia | CC-BY-SA-3.0 |
| Organizaciones | Unidad de tratamiento de datos móviles (MTU) |
| Citar como | "Placa de control para máquina de queso a la plancha" . Appropedia. 2021–2024 . Consultado el 30 de julio de 2025 . |