Download ▼
PDF Download these pages as a PDF so you can print them or read them offline.
Booklet Download these pages as a PDF that you can print, fold and staple into a booklet .
Review the video below as many times as needed, before making your first attempt to ligate the PDA using the molded simulated PDA.
How to use the Training Box to Perform PDA Ligation
Annotations:
00:10 Overview of the surgical instruments needed to practice with the PDA Training Box
00:22 View from the phone App over the sensor, LED and digital score
00:25 Positioning the physical model of the PDA with the pleura attached
01:00 Pressing the reset/initiation button to start the training
01:23 Physical model in place and position (distance) in zero. Ready to initiate the practice
01:40 Beginning of the dissection between the parietal pleura and the aorta. Use forceps (Debakey) and scissors (Metzenbaum)
05:05 Showing where the PDA is, and where the dissection must continue
06:55 PDA and part of the Aorta free of parietal pleura
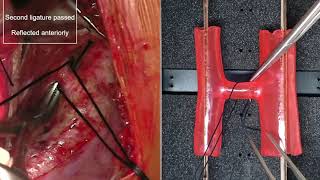
07:07 First silk traction stich in the pleura (Silk 3-0)
07:50 Second silk traction stich in the pleura (Silk 3-0)
08:34 Reset of the sensor (new zero level with tractions in place) to start ligation
08:45 Going around the PDA with a right angle to position the first silk tie (Silk 2-0)
09:20 Going around the PDA with a right angle to position the second silk tie (Silk 2-0)
09:50 Tightening the first knot on the aortic end of the PDA (4-5 knots)
10:40 Tightening the first knot on the pulmonary end of the PDA (4-5 knots)
11:45 Procedure completed (see next video on how to end the training and obtain the total score).
End the training and Obtain the score.
Annotations:
00:15 Once the training is completed, press the "final score" button on the side of the box
00:30 Obtain the final score from the LED digit display. (The score from 0-9: maximum score is 9) The following is simulated training side by side with the surgery.
How to use the Training Box to Perform PDA Ligation
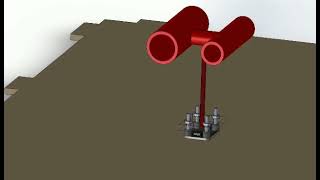
Review the video below to understand the role of distance (promixity) sensors in providing real-time feedback on the displacement of the tissue and hence forces applied to the tissue model during surgery.
Overview of Sensor System