This project aims at exciting children for engineering whilst putting a special focus on female participants. To this day females make up a disproportionally small part of all engineers. This can partially be attributed to a lack of incentives for girls to take part in technical activities and even educational obstacles. The overarching concept therefore prioritizes the participation of girls. However this should not be misunderstood as an exclusion of boys. Using a manual and specific materials children are given the task of building a robot arm capable of drawing. The robot arm consists of 3D-printed joints and other readily available items. It is controlled hydraulically using two pairs of water filled syringes. The following materials are presented in the German language only.
Vielen Kindern fehlt der Bezug zur Technik in ihrem Alltag. „Technikbildung" ist häufig kein eigenes Schulfach und bleibt neben den anderen MINT-Fächern auf der Strecke. Vor allem Mädchen fangen selten ein Studium in den Ingenieurwissenschaften an und die Mädchen und Jungen, die es tun, sind häufig selbst die Kinder von Ingenieuren oder wurden außerhalb der Schule privat gefördert. Ingenieurwissenschaften und Ausbildungsberufe mit Technik Bezug sollten aber kein exklusives Feld sein, sondern allen zugänglich gemacht werden – besonders denen, die im Alltag nicht durch ihr Umfeld gefördert werden! Daher haben wir, vier Studierende der Ingenieurwissenschaften, das Projekt „DIY Hydraulischer Roboterarm für Kinder" ins Leben gerufen. Dieses Projekt zielt darauf ab, ein fundamentales Konzept der Technik, die Hydraulik, an Kinder ab der 3. Klasse alterskonform zu vermitteln. Aus unserer Sicht ist es wichtig, Kinder bereits im frühen Alter für Technik zu begeistern, da diese Erfahrungen prägend für die gesamte Entwicklung sein können. Unser Ziel war es, ein Projekt zu kreieren, welches auf allen soziökonomischen Ebenen möglichst barrierefrei ist. Der Fokus des Baukastens liegt auf dem selbstständigen Arbeiten in Gruppen, dem Ausprobieren, Experimentieren und dem spielerischen Erkennen des naturwissenschaftlichen Prinzips. Uns war es wichtig, dass das Projekt überall durchgeführt werden kann, wo es gerade Zeit gibt: Sei es im Unterricht, in einer Projektwoche oder in der Nachmittagsbetreuung. Daher sind die zur Verfügung gestellten Materialien darauf ausgelegt, von einer Person ohne technisches Hintergrundwissen angewendet werden zu können. Bis auf einige Teile aus dem 3D-Drucker werden ausschließlich Materialien benötigt, die wenig kosten und einfach zu bekommen sind.
Ziele[edit | edit source]
Eines unserer wichtigsten Ziele des Projekts ist es, gezielt auch Mädchen anzusprechen. Viele erhältliche Materialien um Kinder für MINT-Fächer zu begeistern sind auf Jungen zugeschnitten, wodurch Mädchen auf der Strecke bleiben. Betrachtet man die Zahlen der Studienanfängerinnen und Absolventinnen in den MINT-Fächern und speziell den Ingenieurwissenschaften, so wird deutlich, dass hier ein Ungleichgewicht zugunsten des männlichen Geschlechts herrscht. Es ist mittlerweile klar, dass besonders Mädchen bereits früh für MINT-Themen begeistert werden müssen, da sie leider immer noch strukturell gegenüber Jungen benachteiligt sind. Daher war es uns wichtig, unseren Baukasten auf eine Art und Weise zu erstellen, die für alle Geschlechter ansprechend gestaltet ist. Zudem wollten wir, da drei der vier Gruppenmitglieder weiblich sind, auch eine Art „Rolemodel" für junge Mädchen sein und zeigen, was eine Ingenieurin macht. Ein nachhaltiges Interesse an MINT-Fächern wird am besten in jungen Jahren geweckt, weshalb wir eine möglichst junge Zielgruppe ansprechen wollen. Die Arbeit am Baukasten soll außerdem das selbständige Lernen, das Arbeiten in Gruppen, das Experimentieren und die Neugier für Technik stärken. Um das Projekt für Schulen zugänglich zu machen, sollen möglichst günstige Materialien verwendet werden, die idealerweise im Alltag einfach zu erhalten sind. Um das Projekt nachhaltig zu gestalten könnte „Upcycling" eine wichtige Rolle spielen, sprich Materialien verwenden, die im Alltag im Müll landen würden. Im Alltag werden Kinder mit körperlichen und geistigen Einschränkungen, chronischen Krankheiten und sonstigen Beeinträchtigungen häufig übersehen und somit aus dem gesellschaftlichen Miteinander exkludiert. Um den Baukasten inkludierend zu gestalten wollen wir uns mit den Möglichkeiten zur barrierefreien Gestaltung beschäftigen und das Projekt beispielsweise mit audiovisuellen Materialien oder Blindenschrift ergänzen. Damit unser Projekt ohne unser Zutun an beliebigen Orten stattfinden kann, müssen die Materialien für die Lehrkraft so konzipiert sein, dass diese keine technische Bildung benötigt um sie mit den Kindern umzusetzen. Daher sollen unsere Materialien so weitreichend erklärt sein, dass dies gegeben ist. Darüber hinaus sollen Vorschläge zur Umsetzung des Projektes gegeben werden, um die Lehrkraft zu unterstützen. Als zeitliches Ziel für die Umsetzung haben wir uns einen kurzen Projekttag, eine Doppelstunde in der Schule, eine Nachmittagsbetreuung oder ein vergleichbares Zeitfenster ausgewählt. Somit kann unser Baukasten flexibel in verschiedenen Kontexten eingesetzt werden.
Konzept[edit | edit source]
Um die gesetzten Ziele an unser Projekt umzusetzen wurden die zu erstellenden Materialien in zwei Gruppen eingeteilt: Materialien für die Schüler:innen und Materialien für die Lehrkräfte. Das Material für die Kinder umfasst dabei den zu bauenden Roboterarm, die Anleitung, Arbeitsblätter und sonstige zur Verfügung gestellte Materialien. Das Material für die Lehrkräfte umfasst einen Infobogen für die schnelle Übersicht und ggf. Bewerbung des Projektes, Hintergrundinformationen und Hinweise/Vorschläge zur Umsetzung. Als Zielgruppe wurden Kinder ab einem Alter von ca. 10 Jahren, bzw. der dritten Klasse festgelegt. Die Wahl fiel nicht auf eine noch jüngere Altersgruppe, da die Fähigkeiten zum selbstständigen Arbeiten, ein gewisses Maß an motorischen Fähigkeiten, Lesekompetenzen und dem konzentrierten Arbeiten über einen gewissen Zeitraum als gegeben vorausgesetzt werden müssen. Als Thema für den Baukasten wurde ein hydraulischer Roboterarm aus Schläuchen, Spritzen, 3D-Gelenken und einigen Alltagsmaterialien gewählt. Hier wird ein grundlegendes technisches Konzept, die Hydraulik, den Kindern auf eine spielerische Art nähergebracht. Dieses Projekt erfüllt die Ansprüche an das Wecken von Interesse und geforderter simpler Umsetzung, ohne dabei auf teures Material angewiesen zu sein. Leider musste von einem „Upcycling"-Konzept und dem Bauen aus reinen Alltagsgegenständen Abstand genommen werden. Wir entschieden uns dafür, alle Gelenke und Halterungen als 3D-Druck Objekte zu konzipieren. Dies geschah, da Alternativen den Bau deutlich verkompliziert hätten und teilweise motorische Fähigkeiten und die Befähigung zum Umgang von Werkzeugen erfordert hätten, welche die Zielgruppe nicht aufweist. Außerdem wollen wir primär das Konzept der Hydraulik vermitteln und nicht den eigentlichen Bau eines Roboterarms. Wir haben zudem die Hoffnung, dass einige Schulen bereits selbst über 3D-Drucker verfügen oder in der Lage sind, über Hochschulen und 3D-Druck Communities kostengünstig die benötigten Teile zu erhalten. Bei selbstgebauten Gelenken und Halterungen wäre der Fokus des Projektes verloren gegangen und die Erfolgsquote der Kinder gesunken. Beides würde aus unserer Sicht dem Lernerfolg mehr schaden als nutzen. Um gezielt auch Mädchen anzusprechen beschäftigten wir uns mit Veröffentlichungen der aktuellen Forschung und stützten uns auf Wissen von Expert:innen. Eine Erkenntnis lag darin, dass Mädchen häufiger den Praxisbezug suchen als Jungen: Sie wollen wissen, wozu eine Erfindung gut ist und wie sie den Alltag beeinflusst und verbessert, wobei Jungen sich häufiger für das Bauen und die greifbaren Prozesse interessieren. Als Begleitmaterial stellen wir ein Arbeitsblatt mit acht Illustrationen zur Verfügung, auf dem Roboter in verschiedenen alltäglichen Szenen abgebildet sind. Dadurch erhoffen wir, ein Verständnis dafür zu erzeugen, wofür Roboter und Hydraulik im Alltag verwendet werden. Eine weitere Erkenntnis lag darin, dass Mädchen häufig von Jungen ausgebremst werden, da die Geschlechter stereotypisch andere Herangehensweisen an Probleme und Fragestellungen haben, die sich nicht unbedingt positiv ergänzen. Daraus folgerten wir die Empfehlung für Lehrkräfte, die Gruppen nach Geschlechtern zu teilen, um den Mädchen einen „Safe Space" zum Ausprobieren und Kennen Lernen der Thematik zu geben. Bei der Ausarbeitung der Materialien wurde leider klar, dass eine barrierefreie Aufarbeitung der Materialien deutlich aufwändiger ist als zunächst angenommen war. Daher musste auf eine inklusive Ausgestaltung größtenteils verzichtet werden, da das nötige Fachwissen und die zeitlichen Ressourcen fehlten.
Design[edit | edit source]

Der Roboterarm setzt sich aus einem Grundgerüst und dem Antrieb durch hydraulisch gesteuerte Spritzen zusammen. Das Grundgerüst besteht aus zwei Gelenken und einer Stifthalterung, welche über Schaschlickspieße verbunden werden. Da geringe Kosten, Modularität und einfache Montage in diesem Projekt priorisiert wurden, ist die Auswahl an Herstellugsmethoden eingeschränkt. Die Gelenke sind entscheidend für die Funktion des Roboters und den Gesamtzusammenhalt, daher müssen diese zuverlässig funktionieren. Da dieser Anspruch unter Verwendung von gängigen Haushaltsmitteln zu einer hohen Komplexität führt, wurde entschieden sie unter Verwendung von 3D-Druck zu fertigen. Dies erlaubt eine besonders einfache Handhabung, da für das Gelenk keine weiteren Fertigungsschritte von Nöten sind. Das gesamte Gelenk ist ein "print in place"-Gelenk und ist somit direkt einsatzfähig. Die Spritzen werden jeweils mit zwei separaten gelenkigen Halterungselementen nahe der Gelenke befestigt.

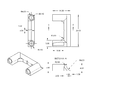
Aufbau[edit | edit source]
Das Kernelement des Gelenks besteht aus zwei Komponenten, welche ohne Kontakt aber ineinander greifend gedruckt werden. Dabei besteht jede der beiden Seiten aus zwei Aufnahmen für Stäbe mit einem Durchmesser von 3mm, und zwei Verbindungelementen. Der einzige Unterschied zwischen den beiden Hälften ist ein Queraufnahme für einen dritten Stab gleicher Größe. Dieser befindet sich auf der rechten Gelenkhälfte. Entsprechend wurde die Zeichnung der rechten Hälfte nicht vollständig bemaßt, da die fehlenden Größen der Zeichnung der linken Hälfte entnommen werden können.


Da die Spritzen an jeweils zwei Punkten an dem Arm befestigt werden, existieren zwei Varianten der Spritzenhalterung. Variante A lässt sich am Kolbenende der Spritze befestigen. Variante B wird an dem Flansch des Konusses angebracht. Beide Variante sind über ein Gelenkelement mit der Stabverbindungskomponente verbunden. Die Stabverbindungskomponente besteht aus zwei Löchern die über die Stäbe geschoben werden, sowie der Achse eines Gelenkelements. Genau wie schon das Gelenk werden die Spritzenhalterungen, jeweils aus zwei Teilen bestehend, kontaktlos aber ineinander greifend gedruckt.
Die Stifthalterung ist eine unbewegliche Komponente. Sie besteht aus zwei Stabaufnahmen und einer orthogonalen Schale in welche ein Stift gelegt wird. Der Stift kann hier durch eine Schnur fixiert werden.
Prototypen[edit | edit source]
Das Design der Roboterarmkomponenten durchlief mehrere Iterationen. Im Folgenden wird auf die verschiedenen Prototypen eingegangen da diese verschiedene Aspekte des Designs motiviert haben.
Zunächst wurde untersucht, ob ein in einem Stück gedrucktes Gelenk gut genug funktionieren kann und ob eine Stabaufnahme die nötige Stabilität liefert. Prototyp A hat gezeigt, dass ein solches Funktionsprinzip prinzipiell möglich ist. Die Stabaufnahmen von Prototyp A waren noch zu eng toleriert und das Gesamtdesign benötigte viel Material. Des Weiteren lies sich das Gelenk nicht besonders weit beugen. Es zeigte sich, dass der intuitiv gewählte Stababstand von 20mm handlich und stabil ist.
Prototyp B hat ein etwas schlankeres Design um weniger Material zu verwenden. Außerdem wurde der Abstand zwischen Stabaufnahme und Gelenk vergrößert um eine größere Beweglichkeit zu erlauben. Es wurde die Toleranz der Stabaufnahme angepasst, was eine einfachere Einführung der Stäbe erlaubt.
Prototyp C zeigt nur geringfügige Formänderungen auf, jedoch wurden die Gelenkelemente entlang einer Achse orientiert. Dies erlaubt eine verbesserte Beweglichkeit trotz eines platzsparenderem Designs. Außerdem wurden die Toleranzen zwischen Achse und Durchbohrung etwas verringert um ungewollte Bewegungen zu verringern. Nachwievor ist bei diesem Prototypen der Materialverbrauch und die Druckzeit relativ hoch. Im Vergleich zu den vorigen Prototypen erlaubt diese Version die zuverlässigste und größte Drehung und Stabilität.
Im Fokus des Designs von Prototyp D stand die Verringerung von Materialverbrauch und damit Druckzeit. Hierzu wurden alle Wände und Verbindungen auf ihre minimale Dicke verringert. Das Gelenkelement wurde in zwei kleinere Teile getrennt. Ziel des getrennten Gelenks ist maximale Stabilität bei minimiertem Volumen. Das Gesamtvolumen des Gelenks wurde sehr stark reduziert. Damit wurde auch die Druckzeit mehr als halbiert. Dies macht die Produktion von vielen Gelenken bedeutend leichter. Jedoch traten bei diesem Prototypen zum ersten Mal zwei neue Probleme auf. Die Beiden Gelenkhälften sind in sich flexibler weshalb eine Verdrehung der Stäbe leicht auftritt. Des Weiteren wurde die auflagefläche auf das Druckbett des 3D-Druckers so weit veringert, dass sich bei nicht optimalen Bedingungen das Gelenk während des Drucks von der Oberfläche löst. Dies macht den Druck unzuverlässig und damit ungeeignet für höhere Stückzahlen.
Das Grundprinzip eines schlanken Designs wurde beim Prototyp E beibehalten jedoch wurden einige kritische Punkte dicker gestaltet. Dies führt bei nur leicht erhöhtem Materialverbrauch zu deutlich besserer Stabilität. Auch das Problem der Druckbetthaftung wurde etwas entschäft tritt jedoch bei mehreren gleichzeitig gedruckten Objekten noch gelegentlich auf.
Prototyp F ist die vorerst finale Version. Es wurde erneut die Grundfläche, und damit entscheidende Verbindungsstücke, vergrößert. Dies hat auf dem verwendeten 3D-Drucker das Problem der Druckbetthaftung behoben und die Gelenkhälften weiter versteift. Es wurde eine fünfte Stabaufnahme orthogonal zu den vorherigen hinzugefügt um ein weiteres Standbein zu ermöglichen. Der Materialverbrauch ist im Vergleich zu Prototyp D um ca. 25% gesteigert worden. Dies erlaubt jedoch bedutend höhere Stabilität und Zuverlässigkeit.
Test[edit | edit source]
Rahmenbedingungen
-

Variante B der Spritzenhalterung. Variante A wird, verbunden über das Gelenkelement, mit der Stabhalterungskomponente gemeinsam gedruckt.
-
Stifthalterung
-
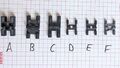
Prototypen des Gelenks


Im Juni 2022 konnten wir im Rahmen von zwei Schulstunden einen ersten Test mit einer 2. Klasse durchführen. Dabei hat der reine Zusammenbau des Roboterarms etwa 45 Minuten gedauert. Die 21 Kinder wurden von uns vier Gruppenmitgliedern, einer der betreuenden Professorinnen und der Klassenlehrerin betreut. Die Materialien wurden von uns mitgebracht und an die Kinder ausgegeben. Von der Klassenlehrerin wurden die Kinder in 2-er Gruppen eingeteilt, bis auf eine Gruppe wurden dabei reine Mädchen- bzw. Jungengruppen gebildet.
Durchführung
Nachdem die Arbeitsblätter von uns verteilt wurden und das Projekt von uns kurz vorgestellt wurde, haben die Kinder sehr enthusiastisch und motiviert mit dem Zusammenbau begonnen. In den meisten Gruppen wurde der Zusammenbau der Hydraulik, also das Aufziehen der Spritzen und das Verbinden mit dem Schlauch, von beiden Kindern parallel durchgeführt. Hier hat sich gezeigt, dass 2-er Gruppen ideal sind, da jedes Kind so zu Beginn ein eigenes kleines Projekt hat und auch später die Steuerung dieser eigenen Spritze übernehmen kann. Gleichzeitig konnten sich die Kinder in den Gruppen unterstützen. Der erste Test der Hydraulik hat für überraschte Gesichter gesorgt. Die Kinder waren von der Funktionsweise fasziniert und motiviert für den weiteren Zusammenbau des Roboterarms.
Der nächste Teil des Zusammenbaus beschäftigt sich mit der Struktur des Roboterarms. Hier waren die Gruppen unterschiedlich schnell und es geschahen häufiger Fehler beim Zusammenbau. Besonders frustrierend waren diese für die Kinder, wenn sie recht spät aufgefallen sind, und somit der Zusammenbau fast von Beginn an neu durchgeführt werden musste. Meistens wurden die Fehler nicht von den Kindern gefunden, es wurde lediglich festgestellt, dass die Teile so nicht zusammenpassen. Wir haben in diesen Fällen helfen müssen, sodass wir vier Gruppenmitglieder durchgängig beschäftigt waren. Problematisch war auch die Verbindung des Stifts mit dem Roboterarm durch eine Schleife. Auch hier wurde unsere Hilfe häufiger benötigt.
Nach dem Zusammenbau hatten fast alle Gruppen ausreichend Zeit, um den Roboterarm zu testen. Hier fiel auf, dass Luftblasen in den Schläuchen die Funktion beeinträchtigen. Auf dieses Problem wird im Rahmen der Kritik an dem Projektaufbau genauer eingegangen.
Bei der Arbeit mit dem fertigen Roboterarm ist weiterhin aufgefallen, dass bei einigen Kindern die Motorik noch nicht fein genug ausgebildet war und einige Kinder sehr ungeduldig im Umgang mit dem Roboterarm waren. Sie waren daher unzufrieden mit ihrer Leistung und der Funktionsweise des Roboterarms. Wir haben hier häufiger die Anweisung geben müssen, die Spritzen ruhiger und geduldiger zu bedienen. Dies hat die Zeichenkünste verbessert, wodurch die Kinder sich wieder motivierter mit dem Roboterarm beschäftigt haben. Außerdem war die Aufgabenstellung das Haus vom Nikolaus zu zeichnen zu schwer und somit demotivierend. Besser wäre hier ein kleiner Katalog von Aufgaben mit aufsteigendem Schwierigkeitsgrad. So können die Kinder den Umgang mit dem Roboterarm an leichten Aufgaben üben und sich dann langsam zu schwereren Aufgaben vortasten. Einige Gruppen hatten von Anfang an ein gutes Gefühl für den Roboterarm und haben sich sehr konzentriert, motiviert und zielstrebig an unterschiedlichen Übungen ausprobiert. Gut angekommen sind dabei die Übungen entweder eine Zeichnung eines anderen Kindes nachzuzeichnen oder von uns vorgegebene Punkte miteinander zu verbinden.
Kritikpunkte
Obwohl die Kinder mit Begeisterung an dem Zusammenbau und dem Test gearbeitet haben, sind uns einige Probleme in Bezug auf den Zusammenbau und die Verwendung des Roboterarms aufgefallen.
Zunächst mussten wir bei jeder Gruppe Hilfestellungen leisten. Typisch waren dabei Fehler beim Zusammenbau, die meistens darauf zurückgeführt werden konnten, dass die Anleitung nicht gründlich genug gelesen wurde. Meistens wurden daher die Punkte
- Wasser der einen vollen Spritze in den Schlauch drücken, bevor die zweite volle Spritze angeschlossen wird
- „Mit der glatten Seite nach unten"
- Unterscheidung „Spritzenhalter Typ A" und „Spritzenhalter Typ B"
nicht beachtet. Außerdem haben viele Gruppen den Zusammenbau der Hydraulik zu zweit durchgeführt, sodass jedes Kind eine Spritzen-Schlau-Kombination zusammengesteckt hat. Danach kam es zu Verwirrung, da nicht erkannt wurde, dass die Schritte danach gemeinsam ausgeführt werden sollen.
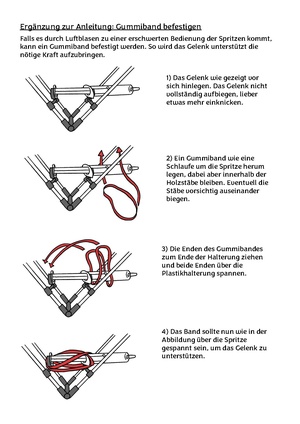
Ein weiteres gängiges Problem waren Luftblasen in den Schläuchen. Obwohl ein Großteil der Kinder sehr konzentriert die Spritzen aufgezogen hat, konnten diese nicht vermieden werden. Dies demotivierte und frustrierte die Kinder, da der Roboterarm nach dem Zusammenbau nicht funktionsfähig war. Auf der Anleitung war ein Trick, die Zuhilfenahme eines Gummibands, nicht dargestellt, daher haben wir jeder Gruppe hier helfen müssen. Nach dieser Hilfe haben die Kinder dann mit Freude den Roboterarm verwendet und waren erstaunt über die Wirkung des Tricks. Dieser könnte jedoch für jüngere Kinder etwas zu kompliziert sein, sodass er von den betreuenden Personen angewendet werden müsste.
Außerdem haben sich über die Gruppen hinweg sehr unterschiedliche Dynamiken beobachten lassen. In der einen 3-er Gruppe hat die Zusammenarbeit nicht gut funktioniert, was in diesem speziellen Fall jedoch auch auf die persönliche Zusammensetzung und die Haltung der Kinder einander gegenüber gelegen haben könnte. Da der Roboterarm zwei Steuerungsoptionen beinhaltet, war die Aufgabenverteilung jedoch in den 2-er Gruppen klarer und somit konnte strukturierter gemeinsam gearbeitet werden. Auch in der geschlechtergemischten Gruppe hat die Zusammenarbeit unterdurchschnittlich gut funktioniert. In diesen Fällen ist vermutlich die Kenntnis der Kinder durch die Pädagogin/den Pädagogen besonders wichtig. Zusätzlich ist uns aufgefallen, dass die Mädchengruppen im Durchschnitt konzentrierter, aufmerksamer, geordneter und genauer gearbeitet haben. In den Jungengruppen wurde häufiger der Text nicht so genau gelesen, der Zusammenbau wurde eher anhand der Bilder durchgeführt. Außerdem waren die Jungengruppen meist lediglich auf den Aufbau fokussiert und haben dem Anwendungsteil wenig Beachtung geschenkt. Den Mädchengruppen, welche meist etwas langsamer im Zusammenbau waren, hat hingegen häufig die Verwendung des Zeichenroboters besondere Freude bereitet.
Weiterhin könnte es förderlich sein, den Bau des Roboterarms noch besser zu motivieren, zum Beispiel durch Anwendungsgebiete eines Roboterarms im Alltag. Vielen Kindern hat der Zusammenbau viel Spaß bereitet, sie waren jedoch unsicher was sie mit dem fertigen Roboterarm tun sollten und inwiefern ein solcher Arm nützlich sein kann.
Fazit
Die Reaktionen der Klassenlehrerin und auch die der Kinder waren sehr positiv. Uns selber ist auch während des Zusammenbaus aufgefallen, dass die Kinder mit Freude und Neugierde an dem Projekt gearbeitet haben. Tiefpunkte konnten meistens überwunden werden, durch kleine Hilfestellungen konnten die Kinder dazu motiviert werden aus einem fehlerhaften Zusammenbau zu lernen und Schritte nochmal durchzuführen. Einige Kinder haben sich in der Pause danach erkundigt, ob sie den Roboterarm mit nach Hause nehmen dürfen, um ihn nochmal zusammenzubauen.
Die Betreuung der Gruppe war jedoch intensiver als zunächst gedacht. Eine Lehrperson allein hätte die Klasse vermutlich nicht betreuen können, da an vielen Stellen Hilfestellungen benötigt wurden. Denkbar wäre hier ein gemeinsamer Zusammenbau, wodurch jedoch der Lern- und Motivationseffekt der eigenständigen Arbeit in einer Kleingruppe in den Hintergrund tritt.
Anpassungen nach dem Test[edit | edit source]
Auf Grundlage des absolvieren Tests in der Schule wurde unser Material noch an einigen Stellen angepasst und ergänzt. Eine der größten Herausforderungen für die Kinder war es, die Spritzen mit den Schläuchen ohne Luftblasen zu verbinden. Wie beschrieben halfen wir den Kindern mit einem Gummiband, die Funktion der Spritzen zu verbessern. Da diese zusätzliche Unterstützung bei beinahe jeder Gruppe notwendig war, wurden die Materialien um eine Anleitung zur Montage des Gummibandes ergänzt. Das Zeichnen hatte sich im Praxistest als schwieriger und frustrierender herausgestellt als erwartet. Die Aufgabe „Malt doch das Haus vom Nikolaus" war deutlich zu anspruchsvoll und wurde von der Anleitung als Hinweis entfernt. Stattdessen liegt nun ein Arbeitsblatt mit fünf nummerierten Punkten bei, um eine einfachere Aufgabe zu bieten. Um in einem Rahmen mit mehr Zeit uns als Vorbilder vor allem für Mädchen zu zeigen, wurden die Arbeitsmaterialien um eine Vorstellung von uns vier Gruppenmitgliedern ergänzt. Dieses Blatt kann von der Lehrkraft für alle ausgeteilt, über einen Beamer gezeigt oder sonstig verwertet werden. Desweiteren wurden einige Illustrationen in der Anleitung angepasst um die Verständlichkeit zu erhöhen und die Kontaktinformationen auf dem Lehrer Handout wurden aktualisiert.
-
![Anleitung zum Zusammenbau des Roboterarms]]](/w/images/thumb/1/19/Anleitung_Roboterarm.pdf/page1-85px-Anleitung_Roboterarm.pdf.jpg)
Anleitung zum Zusammenbau des Roboterarms]]
-
![Eine kurze Vorstellung von unserer Gruppe als ergänzendes Material.]]](/w/images/thumb/5/5d/Wer_wir_sind.pdf/page1-85px-Wer_wir_sind.pdf.jpg)
Eine kurze Vorstellung von unserer Gruppe als ergänzendes Material.]]
-
![Das Arbeitsblatt für die Kinder mit Checkliste und Comic zum Selbstausfüllen.]]](/w/images/thumb/e/e6/Arbeitsblatt.pdf/page1-85px-Arbeitsblatt.pdf.jpg)
Das Arbeitsblatt für die Kinder mit Checkliste und Comic zum Selbstausfüllen.]]
-
![Ein einleitender Text für Lehkräfte, der das Projekt vorstellt und bewirbt, mit allen wichtigen Informationen rund um das Projekt.]]](/w/images/thumb/1/1e/Deckblatt_Lehrkraefte.pdf/page1-85px-Deckblatt_Lehrkraefte.pdf.jpg)
Ein einleitender Text für Lehkräfte, der das Projekt vorstellt und bewirbt, mit allen wichtigen Informationen rund um das Projekt.]]
-
![Eine Urkunde, die den Teilnehmenden nach (erfolgreichem) Bau des Roboterarms ausgehendigt werden kann.]]](/w/images/thumb/0/04/Urkunde.pdf/page1-85px-Urkunde.pdf.jpg)
Eine Urkunde, die den Teilnehmenden nach (erfolgreichem) Bau des Roboterarms ausgehendigt werden kann.]]
Downloads[edit | edit source]