
Una impresora 3D RepRap colgada del techo.
El proyecto RepRap mostró por primera vez al mundo la impresión 3D barata a pequeña escala en 2006. Su diseño no estaba muy bien pensado intencionadamente. La idea era que una impresora 3D que pudiera imprimir sus propias piezas se mejoraría mediante la evolución de iteraciones, sin importar la calidad del primer diseño. Esto resultó ser bastante correcto, ya que rápidamente creció una gran comunidad en torno a los primeros diseños de RepRap. Los usuarios de RepRap comenzaron a experimentar y remezclar todas las partes de la impresora, incluido su sistema de coordenadas cartesianas.
Contenido
Archivos fuente y documentación externa.
| Código fuente: | actualmente en el repositorio de Gitlab , anteriormente en el repositorio de Github | [1] enlace rápido al firmware |
| Licencias: | El repositorio tiene GPLv2, el blog usa la licencia de documentación libre Gnu, los videos de Vimeo tienen licencia CC-BY | Sigue las recomendaciones de la FSF. |
| Proceso de construcción: | Publicaciones de blog [2] , [3] , [4] , [5] , [6] , [7] , [8] , [9] , [10] , [11] , [12] , [13] , [14] , [15] , [16] | vídeos e imágenes, muy detallados. |
| Hilo de desarrollo: | Foro RepRap Hangprinter , consulte también el hilo de lanzamiento del proyecto original | |
| Página wiki: | en reprap.org | anticuado |
| Todos los videos: | Usuario de vimeo 23166500 | |
| Página web del proyecto: | Hangprinter.org |
Entendiendo el mercado
Los primeros diseños de impresoras 3D no cartesianas fueron Tripod-Repstrap (2007) y sus sucesores geométricamente similares, Rostock (2012) [1] y Lisa Simpson (2013). [2] [3] Otros diseños RepRap no cartesianos incluyen GUS Simpson (2013), [4] Morgan (2013), [5] Wally (2013) [6] y Feather (2013). [7]
Todas estas impresoras intentan intercambiar cálculos geométricos más pesados para deshacerse de los requisitos de hardware o los pasos de construcción que consumen mucho tiempo. Todos tienen marcos y todavía quedan ciclos de reloj sobrantes en sus CPU Arduino. La idea de Hangprinter es omitir por completo el marco rígido personalizado y, en su lugar, confiar en conexiones de cables a estructuras rígidas ya construidas, como el interior de las casas. Este diseño entra en la categoría más general de robots de cable ( ver enlace de Wikipedia ).
Hacer que esto funcione daría lugar a volúmenes de impresión potencialmente enormes a precios de hasta 300 dólares aproximadamente. Los precios de los competidores son:
| Nombre | Precio | Volumen de impresión |
|---|---|---|
| gran representante | alrededor de $40,000 [8] | 1 metro 3 |
| Gigabot XL | alrededor de $ 13 000 [9] | 0,27m3 |
| X1000 | alrededor de $ 16 000 [10] | 0,48m3 |
Otras impresoras experimentales a gran escala incluyen la Big Delta Printer de Wasp [11] y la KamerMaker, un diseño cartesiano ampliado. [12] Otras soluciones experimentales para la impresión a gran escala incluyen reemplazar el marco con capacidades de seguimiento de líneas y un vehículo de soporte, como los Minibuilders. [13]
Los competidores presentados son muy caros y no se reproducen muy bien, muchos de ellos ni siquiera son hardware de diseño libre. No satisfacen las necesidades de, por ejemplo, el proyecto Open Source Ecology, que quiere imprimir componentes plásticos estructurales como paneles de carrocería y torres de gusanos rojos con herramientas OSHW.
Objetivos del proyecto
Nuevos objetivos de diseño de proyectos en la Versión 4 (2018)
- Un caballo de batalla confiable
- que la gente disfrutará usando
- y difundiendo
- con fines de lucro
Objetivo final declarado en 2018: convertirse en una máquina de fabricación universal (UMM)
Objetivos iniciales del proyecto.
- Recuento de piezas bajo
- Fácil de imprimir, montar, instalar y distribuir
- Gran volumen de construcción
- Barato
- Capaz de imprimir muchas de sus propias piezas.
Diseño
El creador y la comunidad están trabajando en la versión 4 en septiembre de 2018. Vea los nuevos objetivos de diseño en el blog de Tobben.
Consideraciones de diseño para la primera versión.
- Coloque todo el hardware (excepto el convertidor CA/CC) en una sola unidad.
- Sólo un vector de fuerza hacia arriba, compensado con contrapeso.
- La restricción excesiva permite una compensación flexible de las líneas flojas.
- Cuando la impresora está inactiva, se pueden retraer todas las cuerdas. Permite soluciones de almacenamiento elegantes. Podría hacerlo popular en las grandes ciudades, donde el espacio interior es escaso.
- Líneas paralelas unidas a carretes comunes para evitar la rotación.

El primer boceto de la geometría de Hangprinters.
El firmware de Clerck corta las líneas rectas en segmentos de línea. Esta es la ecuación que el firmware de Clerck necesita resolver para cada segmento de línea.
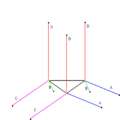
Denominación de los ejes de la geometría de Clerck. Las líneas paralelas impiden la rotación. El triángulo negro es Clerck. Los puntos negros se llaman puntos de anclaje. Los puntos amarillos se llaman puntos de acción.

Una representación del archivo CAD de Clerck en noviembre de 2015.

Un Clerck impreso, montado y ensamblado, octubre de 2015.





Vídeo que muestra el diseño en acción.
Costos
BMO abierto de Hangprinter versión 3 (con Mechaduinos como controladores de motor de circuito cerrado)
!!¡¡ANTICUADO!!
| Artículo | Cantidad | Precio total | Nota |
|---|---|---|---|
| Extremo caliente del volcán E3D V6 | 1 | $100 | Amablemente patrocinado por E3d para el desarrollo de prototipos. Gracias E3d! |
| motor paso a paso nema17 | 5 | $60 | El prototipo utiliza 17HS4401N. Advertencia: si utiliza motores paso a paso con otro tamaño para el eje del extrusor o el eje vertical, deberá ajustar los archivos CAD para que coincidan con su motor. Las dimensiones 17HS4401N están codificadas en el archivo fuentemeasured_numbers.scad |
| arduino mega | 1 | $10 | Compre en conjunto con RAMPS y controladores paso a paso a precios más bajos |
| RAMPAS | 1 | $5 | El prototipo utiliza v1.4 |
| Portador de controlador de motor paso a paso drv8825 (Pololu) | 5 | $10 | El modelo de controlador paso a paso no es importante siempre que la corriente de salida esté cerca de la corriente máxima del paso a paso (1,7 A para 17HS4401N) |
| 623 rodamiento | 2 | $2 | |
| 623 rodamiento con ranura en V | 5 | $5 | Actualmente, Hangprinter (versión 2) no los usa, pero es bueno tenerlos si alguna vez desea reducir su impresora, por ejemplo, para permitir motores paso a paso más livianos. |
| 608 rodamiento | 4 | $2 | |
| Módulo RF transceptor Bluetooth JY-MCU | 1 | $6 | Usado como se describe aquí |
| Convertidor de 220 V CA a 12 V (fuente de alimentación) que proporciona aproximadamente 15 A o más (es decir, 180 W o más de potencia). | 1 | $16 | Un voltaje más alto daría un mejor rendimiento del paso a paso. Antes de aumentar el voltaje, consulte aquí . |
| Pieza de caña de pescar de diámetro interior de ojos de 2,7 mm | 9 | $9 | |
| Engranaje impulsor tallado | 2 | $4 | El prototipo utiliza E3D hobb-goblin de 5 mm de diámetro interior. Si utiliza engranajes impulsores de diferente tamaño, ajuste Hobbed_insert_diametery Hobbed_insert_heighten measured_numbers.scadconsecuencia. |
| Juego de tornillos, tuercas y tuercas nyloc M3 | 1 | $5 | Precio estimado, los tornillos y tuercas suelen venderse en mayores cantidades, por lo que la inversión puede ser mayor. |
| Metros de hilo de pescar no elástico (dynema) | 15 | $1 | El hilo de pescar siempre se vende en mayores cantidades, por lo que la inversión será mayor |
| Ganchos para puntos de anclaje | 9 | $5 | Cualquier gancho simple como este: enlace a imagen ... funcionará bien. |
| Material de impresión y electricidad para piezas de impresión 3D. | 1 | $10 | El material de impresión se vende únicamente en grandes cantidades, por lo que la inversión será de al menos unos 30 dólares. |
| Coste total | $250 | ||
{kind=link}
Dificultades
- Mantener rotaciones pequeñas, a pesar de las fuerzas de
- Cable de energía
- Filamento
- motores de aceleración
- Mantener el filamento y el cable de alimentación alejados de los engranajes, la impresión y (fuera del) extremo caliente.
- Configuración de firmware suficientemente precisa para mantener las líneas ajustadas durante todo el volumen de impresión
- Encontrar la posición inicial de forma fiable y repetible
Posición de la casa
Si se agregó una unidad IMU (acelerómetro + giroscopio), este podría ser el único sensor necesario. El inicio se podría hacer así:
- Si la impresora no está horizontal, apriete las líneas D hasta que quede
- Baje la impresora (extienda las líneas D) hasta que el extremo caliente choque contra la superficie de impresión
- Establezca la longitud D. El eje D ahora está calibrado
- Extienda las líneas D 2 mm adicionales
- Aunque no sea horizontal:
- Calcular la dirección de inclinación.
- Apriete A, B o C para contrarrestar la inclinación.
- Apriete las líneas D 2 mm
- Ahora estamos en la posición inicial, todos los ejes calibrados.
Idea de compensación automática de línea floja
Se podría utilizar una unidad IMU durante la impresión de la siguiente manera:
- Calcule alguna cantidad que describa el "tirón esperado" de gcode (Marlin y otros firmware ya hacen esto. En Marlin, el valor estaría incluido en la estructura block_t)
- Utilice IMU para registrar el "imbécil observado" (nuevamente metiéndolo en block_t en Marlin)
- Escribe una función
F(expected jerk, observed jerk)→Move_to_tighten_stringsy llámala de vez en cuando.
Dado que las IMU baratas de 6 ejes son realmente buenas para registrar la rotación, espero que la noción de "tirón" incluya la rotación (con la rotación esperada siempre 0). El tiempo será realmente importante, pero Hangprinter-Marlin ya tiene cinco nopoperaciones en medio del código paso a paso (consulte la función de caballo de batalla en stepper.cpp), que podrían utilizarse para lecturas de IMU precisamente en los momentos correctos. De todos modos, los nops están ahí para esperar los chips de controlador paso a paso drv8825.
Gracias a Dejay en forums.reprap.org por señalar la posibilidad de un mecanismo similar.
Próximos pasos
- Agregar una unidad IMU económica como la MPU-6050
- Construyendo una versión más pequeña de Clerck usando motores Nema14 para reducir la masa y el costo
- Retire los motores del cabezal del extrusor y colóquelos en los soportes para reducir la masa.
Referencias
- ↑ http://reprap.org/wiki/Rostock
- ^ http://reprap.org/wiki/LISA_Simpson
- ^ http://forums.reprap.org/read.php?178,267835
- ^ http://reprap.org/wiki/GUS_Simpson
- ^ http://reprap.org/wiki/RepRap_Morgan
- ^ http://reprap.org/wiki/Wally
- ^ http://forums.reprap.org/read.php?1,214837,214859
- ^ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ^ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ^ http://www.3ders.org/articles/20140608-introduciendo-gran-formato-x1000-3d-printer.html
- ^ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ^ http://3dprintcanalhouse.com/
- ^ http://robots.iaac.net/#robots