
3D-принтер RepRap, свисающий с потолка.
Проект RepRap впервые продемонстрировал миру дешевую мелкосерийную 3D-печать в 2006 году. Их дизайн был намеренно не очень продуман. Идея заключалась в том, что 3D-принтер, способный печатать свои собственные детали, будет улучшаться путем эволюции, например, итераций, независимо от качества первого проекта. Это оказалось совершенно правильным, поскольку вокруг первых нескольких проектов RepRap быстро выросло большое сообщество. Пользователи RepRap начали экспериментировать и переделывать все части принтера, включая его декартову систему координат.
Содержание
Исходные файлы и внешняя документация
| Исходный код: | в настоящее время находится в репозитории Gitlab , ранее в репозитории Github | [1] быстрая ссылка на прошивку |
| Лицензии: | Репозиторий имеет лицензию GPLv2, блог использует лицензию Gnu Free Documentation License, видео Vimeo имеют лицензию CC-BY. | Выполняет рекомендации FSF. |
| Процесс сборки: | Сообщения в блогах [2] , [3] , [4] , [5] , [6] , [7] , [8] , [9] , [10] , [11] , [12] , [13] , [14] , [15] , [16] | видео и изображения, очень подробные |
| Тема разработки: | Форум RepRap Hangprinter , см. также исходную тему запуска проекта. | |
| Вики-страница: | на сайте Reprap.org | устаревший |
| Все видео: | Пользователь Vimeo 23166500 | |
| Веб-страница проекта: | Hangprinter.org |
Понимание рынка
Ранними некартезианскими 3D-принтерами были Tripod-Repstrap (2007) и его геометрически схожие преемники Росток (2012) [1] и Лиза Симпсон (2013). [2] [3] Другие некартезианские проекты RepRap включают GUS Simpson (2013), [4] Morgan (2013), [5] Wally (2013) [6] и Feather (2013). [7]
Все эти принтеры пытаются заменить более тяжелые геометрические вычисления ради избавления от требований к оборудованию или трудоемких этапов сборки. У всех есть кадры, и в их процессорах Arduino еще остались свободные тактовые циклы. Идея Hangprinter состоит в том, чтобы полностью отказаться от жесткой индивидуальной рамы и вместо этого полагаться на проводные соединения с уже построенными жесткими конструкциями, например, внутри домов. Эта конструкция попадает в более общую категорию кабельных роботов ( см. ссылку в Википедии ).
Выполнение этой работы приведет к потенциально огромным объемам печати по ценам примерно до 300 долларов. Цены конкурентов:
| Имя | Цена | Объем печати |
|---|---|---|
| Большой представитель | около 40 000 долларов США [8] | 1 м 3 |
| Гигабот XL | около 13 000 долларов США [9] | 0,27 м 3 |
| Х1000 | около 16 000 долларов США [10] | 0,48 м 3 |
Другие крупномасштабные экспериментальные принтеры включают принтер Wasp's Big Delta Printer [11] и KamerMaker, увеличенную декартову конструкцию. [12] Другие экспериментальные решения для крупномасштабной печати включают замену рамы на возможности отслеживания линий и вспомогательное транспортное средство, такое как Minibuilders. [13]
Представленные конкуренты очень дороги и не очень самовоспроизводятся, многие из них даже не являются бесплатным дизайнерским оборудованием. Они не удовлетворяют потребности, например, проекта Open Source Ecology, который хочет печатать структурные пластиковые компоненты, такие как панели кузова автомобиля и башни красного червя, с помощью инструментов OSHW.
Цели проекта
Новые цели проектирования проекта в версии 4 (2018 г.)
- Надежная рабочая лошадка
- что люди будут получать удовольствие от использования
- и распространение
- ради прибыли
Конечная цель, заявленная в 2018 году: стать универсальной производственной машиной (UMM).
Первоначальные цели проекта
- Малое количество деталей
- Легко распечатать, собрать, установить и распространить
- Огромный объем сборки
- Дешевый
- Возможность печатать множество собственных деталей.
Дизайн
Автор и сообщество работают над версией 4 в сентябре 2018 года. Ознакомьтесь с новыми целями дизайна в блоге Тоббена.
Рекомендации по проектированию первой версии
- Поместите все оборудование (кроме преобразователя переменного/постоянного тока) в один блок.
- Только один вектор силы направлен вверх, компенсируемый противовесом.
- Чрезмерное ограничение позволяет гибко компенсировать провисание линий.
- Когда принтер простаивает, можно втянуть все струны. Обеспечивает элегантные решения для хранения. Это могло бы сделать его популярным в больших городах, где мало закрытых помещений.
- Параллельные лески прикреплены к общим катушкам для предотвращения вращения.

Первый набросок геометрии Hangprinters.
Прямые линии разбиваются на отрезки прошивкой Клерка. Это уравнение, которое прошивка Clerck должна решить для каждого сегмента линии.
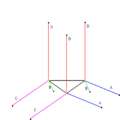
Именование осей геометрии Клерка. Параллельные линии предотвращают вращение. Черный треугольник — это Клерк. Черные точки называются опорными точками. Желтые точки называются очками действия.

Рендеринг CAD-файла Клерка по состоянию на ноябрь 2015 года.

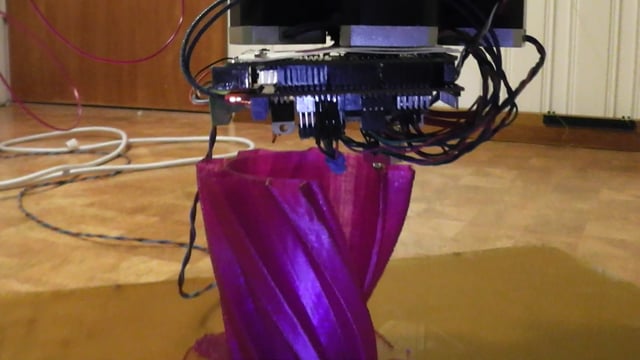
Распечатанный, смонтированный и собранный «Клерк», октябрь 2015 г.





Видео, показывающее конструкцию в действии
Расходы
Открытый BMO Hangprinter версии 3 (с Mechaduinos в качестве контроллеров двигателей с замкнутым контуром)
!!УСТАРЕЛО!!
| Элемент | Кол-во | Итоговая цена | Примечание |
|---|---|---|---|
| Горячий конец E3D V6 Volcano | 1 | 100 долларов | Любезно спонсируемая E3d разработка прототипа. Спасибо E3d! |
| Шаговый двигатель Nema17 | 5 | 60 долларов США | В прототипе используется 17HS4401N. Предупреждение. Если вы используете шаговые двигатели другого размера для оси экструдера или вертикальной оси, вам необходимо будет настроить файлы САПР в соответствии с вашим двигателем. Размеры 17HS4401N закодированы в исходном файле.measured_numbers.scad |
| Ардуино Мега | 1 | 10 долларов | Покупайте в комплекте с RAMPS и шаговыми драйверами по более низким ценам. |
| РАМПЫ | 1 | 5 долларов | Прототип использует версию 1.4 |
| drv8825 держатель драйвера шагового двигателя (Pololu) | 5 | 10 долларов | Модель шагового драйвера не имеет значения, если выходной ток близок к максимальному току шагового двигателя (1,7 А для 17HS4401N). |
| 623 подшипник | 2 | 2 доллара | |
| 623 подшипник с V-образной канавкой | 5 | 5 долларов | В настоящее время Hangprinter (версия 2) их не использует, но их полезно иметь, если вы когда-нибудь захотите снизить скорость работы вашего принтера, например, чтобы использовать более легкие шаговые двигатели. |
| 608 подшипник | 4 | 2 доллара | |
| Радиочастотный модуль Bluetooth-трансивера JY-MCU | 1 | 6 долларов | Используется, как описано здесь |
| Преобразователь переменного тока 220 В в напряжение 12 В (источник питания), выдающий ток около 15 А или более (т.е. мощность 180 Вт или более). | 1 | 16 долларов США | Более высокое напряжение обеспечит лучшую производительность шагового двигателя. Прежде чем повышать напряжение, см. здесь . |
| Часть удочки диаметром 2,7 мм с проушинами внутри | 9 | 9 долларов | |
| Зубчатая ведущая шестерня | 2 | 4 доллара | В прототипе используется хобб-гоблин E3D с внутренним диаметром 5 мм. Если вы используете приводные шестерни другого размера, отрегулируйте Hobbed_insert_diameterих соответствующим Hobbed_insert_heightобразом measured_numbers.scad. |
| Набор винтов М3, гаек и нейлоковых гаек. | 1 | 5 долларов | Ориентировочная цена, винты и гайки часто продаются в больших количествах, поэтому инвестиции могут быть больше. |
| Метры неэластичной лески (динама) | 15 | 1 доллар | Леска всегда продается в больших количествах, поэтому инвестиции будут больше. |
| Крючки для точек крепления | 9 | 5 долларов | Любой простой крючок вроде этого: ссылка на изображение ... подойдет. |
| Печатный материал и электричество для деталей 3D-печати | 1 | 10 долларов | Материалы для печати продаются только в больших количествах, поэтому инвестиции составят не менее 30 долларов США. |
| Общая стоимость | 250 долларов США | ||
{kind=link}
Сложности
- Сохранение малых вращений, несмотря на силы со стороны
- Силовой кабель
- Нить
- Ускорительные двигатели
- Берегите нить накала и силовой кабель от шестерен, печати и (снаружи) горячего конца.
- Достаточно точная конфигурация встроенного ПО, обеспечивающая плотность линий по всему объему печати.
- Надежное и повторяемое определение исходного положения
Исходное положение
Если был добавлен блок IMU (акселерометр + гироскоп), это может быть единственный необходимый датчик. Возврат можно сделать так:
- Если принтер не расположен горизонтально, затяните D-линии до тех пор, пока он не станет горизонтальным.
- Опускайте принтер (вытягивайте D-линии), пока горячий конец не упадет на поверхность печати.
- Установите D-длину. Ось D теперь откалибрована.
- Удлините D-линии еще на 2 мм.
- Пока не горизонтально:
- Рассчитать направление наклона
- Затяните A, B или C, чтобы предотвратить наклон.
- Затяните D-линии на 2 мм.
- Сейчас мы находимся в исходном положении, все оси откалиброваны.
Идея автоматической компенсации провисания стропы
Блок IMU можно использовать во время печати следующим образом:
- Вычислите некоторую величину, описывающую «ожидаемый рывок» из gcode (Marlin и другие прошивки уже делают это. В Marlin значение будет запрятано в структуру block_t)
- Используйте IMU для записи «наблюдаемого рывка» (снова вставляя его в блок_t в Marlin)
- Напишите функцию
F(expected jerk, observed jerk)→Move_to_tighten_stringsи вызывайте ее время от времени.
Поскольку дешевые 6-осевые IMU действительно хорошо записывают вращение, я ожидаю, что понятие «рывок» будет включать в себя вращение (при этом ожидаемое вращение всегда равно 0). Выбор времени будет очень важен, но Hangprinter-Marlin уже имеет пять nopопераций в середине пошагового кода (см. «рабочую функцию» в разделе stepper.cpp), которые можно использовать для считывания IMU точно в нужное время. В любом случае они nopпросто ждут чипов драйвера шагового двигателя drv8825.
Спасибо Деджею на forums.reprap.org за указание на возможность подобного механизма.
Следующие шаги
- Добавление дешевого блока IMU, такого как MPU-6050.
- Создание уменьшенной версии Clerck с использованием двигателей Nema14 для снижения массы и стоимости.
- Снимите двигатели с головки экструдера и установите на опоры, чтобы снизить массу.
Рекомендации
- ↑ http://reprap.org/wiki/Росток
- ↑ http://reprap.org/wiki/LISA_Simpson
- ↑ http://forums.reprap.org/read.php?178,267835
- ↑ http://reprap.org/wiki/GUS_Simpson
- ↑ http://reprap.org/wiki/RepRap_Morgan
- ↑ http://reprap.org/wiki/Wally
- ↑ http://forums.reprap.org/read.php?1,214837,214859
- ↑ http://www.fabbaloo.com/blog/2014/2/15/big-rep-one-is-one-big-rep
- ↑ http://web.archive.org/web/20170910101611/https://shop.re3d.org/collections/gigabot-3d/products/gigabot-xl
- ↑ http://www.3ders.org/articles/20140608-introducing-large-format-x1000-3d-printer.html
- ↑ http://www.3ders.org/articles/20150914-wasp-big-delta-3d-printer-has-potential-to-build-insect-repelling-houses.html
- ↑ http://3dprintcanalhouse.com/
- ↑ http://robots.iaac.net/#robots