

Esta es una versión totalmente automatizada de Recyclebot v2.2 con muchas funciones mejoradas. Algunas de las características son:
- El tipo de plástico se puede seleccionar desde la interfaz del teclado y el controlador actualiza automáticamente la temperatura de extrusión del plástico.
- La temperatura de extrusión también se puede indicar mediante la interfaz del teclado para cualquier tipo de plástico que pueda fundirse y extruirse.
- Interfaz LCD para un mejor seguimiento del proceso.
- No hay extrusión hasta que se alcance la temperatura de extrusión; controlado automáticamente por microcontrolador, con (opción manual).
- Opciones de control de energía de bajo costo mediante Triac y MOSFET.
Más información: Christian Baechler, Matthew DeVuono y Joshua M. Pearce, " Reciclaje distribuido de polímeros residuales en materia prima RepRap " Rapid Prototyping Journal, 19 (2), págs. 118-125 (2013). acceso abierto

Contenido
- 1 Lista de
- 2 Cálculos de potencia
- 3 Sección de calentamiento/zona de fusión
- 4 Monitoreo de temperatura y control de procesos
- 5 Cómo ensamblar (componentes eléctricos)
- 6 Cómo ensamblar (componentes mecánicos)
- 7 Cómo probar
- 8 Cómo utilizar
- 9 Solución de problemas
- 10 Trabajo futuro: mejorar esto
- 11 Algunas referencias útiles y enlaces externos.
- 12 Ver también
Lista de
Los principales componentes mecánicos se fabricaron en un taller mecánico y sus detalles se pueden encontrar en http://www.thingiverse.com/thing:12948
Los componentes electrónicos del RecycleBot se encuentran a continuación.
Cálculos de potencia
El primer paso es elegir la potencia necesaria para fundir y extruir plástico. Para RecycleBot v2.2 y Recyclebot v2.3, se eligió un nivel de potencia máximo (Pmax) de 440 W en función de la velocidad de extrusión, el tamaño del extrusor y los requisitos. Cabe señalar que aunque se eligió la Pmax como 440 W, este nivel de potencia apenas se utiliza; Como este nivel es lo suficientemente bueno como para alcanzar una temperatura de 500 °C casi instantáneamente, se debe utilizar un sistema de control de energía muy confiable para que el sistema permanezca dentro de los límites acotados. A este nivel de potencia máximo, casi todos los tipos de plástico se vaporizan instantáneamente. El sistema está diseñado para funcionar muy por debajo de una temperatura máxima de 350 C que se puede alimentar o elegir desde la interfaz del teclado.
Variables y constantes
- Pmax: Potencia máxima
- n: número de vueltas en la sección del tubo de calefacción
- d: diámetro exterior de la sección del tubo de calefacción
- Ω': resistencia del alambre de nicrom por unidad de longitud
- r: resistencia del alambre de nicrom
- L: longitud del alambre de nicrom
- V: diferencia de potencial utilizada para alimentar el elemento calefactor (nicrom) = 110 V
- I: corriente que fluye a través del elemento calefactor (nicrom)
PAG=V.I{\displaystyle P=VI}

⇒I=PAG/V{\displaystyle \Rightarrow I=P/V}
PAG=I2.r{\displaystyle P=I2.r}

⇒r=PAG/I2{\displaystyle \Rightarrow r=P/I2}

r=Ω′.l{\displaystyle r=\Omega '.L}

⇒l=r/Ω′{\displaystyle \Rightarrow L=r/\Omega '}

La longitud del nicrom se calcula según el procedimiento mencionado anteriormente. Hay dos tipos de nicrom, desnudos y aislados. Si se utiliza nicromo aislado, asegúrese de que el nicromo esté en contacto con la sección de calentamiento de metal de la tubería en toda su longitud; de lo contrario, incluso un ligero espacio de aire entre el nicromo y la interfaz de metal provocará una temperatura alta localizada y el nicromo comenzará a humear. Por lo tanto, es mejor utilizar alambre de nicromo desnudo con cuentas de cerámica aisladas, como se muestra en la galería de imágenes a continuación. Esto nos permite utilizar mayor potencia y mayor temperatura de funcionamiento. El calibre de nicrom se selecciona en función de la longitud requerida, la corriente y los requisitos de potencia para la calefacción. Para ello, se puede utilizar nicromo 18-26 AWG. Para un control basado en bajo voltaje y alta corriente, se recomienda nicrom grueso y para control basado en alto voltaje (CA) y baja corriente, se recomienda nicrom delgado ya que tiene un valor más alto de Ω'.
Para este RecycleBot, se utilizó 26 AWG de nicromo junto con perlas de cerámica para obtener una temperatura máxima del orden de 350 ° C. La longitud del nicrom era de aproximadamente 10 pies y tenía 2,67 ohmios/pie de resistencia.
Sección de calentamiento/zona de fusión
Como el calentador es la sección más importante, debe diseñarse y fabricarse con precisión para obtener mejores resultados, ya que cambios de temperatura de unos pocos grados pueden dar lugar a diferentes propiedades mecánicas del plástico extruido. Otro criterio importante para la sección de calentamiento es crear un ambiente de calentamiento uniforme de modo que la temperatura permanezca casi constante en todo el barril, de modo que el plástico extruido sea uniforme. Para lograr esto, se usaron perlas de cerámica de alta temperatura para aislar el alambre de nicromo desnudo para lograr aislamiento eléctrico del barril de hierro, y una ventaja de usar este esquema es el aislamiento térmico de alta calidad del ambiente y las transferencias de calor eficientemente al barril de hierro ya que la parte inferior de las cuentas de cerámica descansa firmemente sobre el metal y la superficie superior está aislada del aire, que luego también está aislado.
Pasos para hacer la sección del calentador.
- Limpie el cañón y luego haga rugosa la superficie superior con una lima.
- Vuelva a limpiar la superficie y elimine los restos metálicos y el polvo que queden.
- Corte la longitud requerida de alambre de nicromo, enderécelo y enganche los extremos a una abrazadera.
- Inserte con cuidado las cuentas de cerámica en el alambre de nicrom una por una hasta que todo el alambre esté completamente cubierto con cuentas de cerámica.
- Tome el cemento para horno y cubra el barril de hierro por toda la superficie; debe asegurarse de que toda la superficie esté completamente cubierta con cemento para horno, ya que cualquier metal desnudo expuesto puede presentar riesgo de cortocircuito con el nicrom desnudo y, por lo tanto, elevarlo. las posibilidades de sufrir una descarga eléctrica (y destruir su fuente de alimentación).
- Tome con cuidado el alambre de nicrom y colóquelo sobre el cañón y cúbralo lentamente como si estuviera haciendo una bobina con alambre de nicrom.
- Fije firmemente los dos extremos libres del nicromo a una abrazadera y aplique cemento de horno para cubrir toda la superficie de las cuentas de cerámica y debería verse como en la imagen de la galería. Nuevamente se enfatiza que el cemento para horno debe aplicarse por todas partes para cubrir toda la superficie de las perlas de cerámica para que se adhieran fuertemente al metal subyacente y también debe formar una capa de aislamiento eléctrico tal que el nicrom desnudo no deba tocar el metal en ninguna parte. .
- Déjelo secar durante al menos 24 horas.
- Conecte los dos extremos libres con pinzas de cocodrilo para encender el calentador.
Nota de seguridad: use guantes mientras usa cemento para hornos, ya que es de naturaleza alcalina y puede lesionarlo y dañar la piel si se expone durante un tiempo prolongado; si por casualidad la piel entra en contacto con el cemento para hornos, lávela con agua corriente inmediatamente. Se recomienda que haga esto en una campana si tiene acceso a una.

Perlas de cerámica utilizadas para aislamiento.

Cemento de horno utilizado para aislamiento eléctrico y térmico.

Sección del calentador con nicromo enrollado y envuelto sobre el barril de hierro.

Sección calefactora con horno aplicado en toda la superficie.




Monitoreo de temperatura y control de procesos
Controlar la temperatura y otros procesos relacionados del reciclaje y extrusión de plástico de manera eficiente y al mismo tiempo reducir el costo es el desafío clave para el desarrollo de RecycleBot, especialmente para aplicaciones domésticas. Para promover RecycleBot para la sostenibilidad abierta , todo el sistema de control está diseñado para funcionar en Arduino , que es una plataforma de desarrollo de aplicaciones basada en microcontroladores de código abierto muy popular. Al ser fácil de usar y programar con un excelente soporte de la comunidad de usuarios, Arduino es una plataforma de creación rápida de prototipos de bajo costo, ideal para implementar un sistema de control para RecycleBot. Se utilizó Arduino Mega para diseñar e implementar el sistema, que tiene suficientes pines de entrada/salida para interconectar la pantalla LCD, el teclado y otros componentes.
Todo el proceso se divide en dos partes.
- Modo de entrada
- Modo de control
Modo de entrada
El proceso comienza con la entrada del usuario sobre la selección del plástico o la temperatura de extrusión. Con la opción de 10 tipos diferentes de plástico, el usuario puede seleccionar el tipo de plástico que desea reciclar y el programa carga automáticamente el rango de temperatura óptimo para operación/extrusión para ese tipo de plástico en particular. Alternativamente, el usuario también puede indicar la temperatura de extrusión para cualquier tipo de plástico que pueda operarse por debajo de 350 o C. Después de configurar la temperatura de extrusión, el programa solicita al usuario que confirme la temperatura y una vez configurada la temperatura, el programa pasa a el modo de control.
Modo de control
En el modo de control, el microcontrolador toma la temperatura como entrada y ajusta la potencia de salida del calentador en consecuencia, de modo que la temperatura permanezca dentro del rango límite establecido que es 15 o C por encima y por debajo de la temperatura de extrusión establecida. El sistema está diseñado de tal manera que si por algún medio la temperatura del sistema excede la temperatura de extrusión establecida, la energía del calentador se corta por completo hasta que la temperatura del sistema esté dentro del rango límite establecido. Además, cuando la temperatura está dentro del rango establecido, comienza el proceso de extrusión, es decir, el motor comienza a alimentar el plástico triturado desde la tolva al calentador, también arranca el motor paso a paso del carrete que enrolla el filamento y lo enrolla sobre un carrete. Si la temperatura cae 15 o C por debajo de la temperatura de extrusión, el programa detiene el motor alimentador y el motor de la bobina para garantizar que la calidad del filamento siga siendo la misma, y tan pronto como la temperatura del sistema alcance el rango de operación establecido, ambos El motor del alimentador y del carrete vuelve a funcionar.
Código de programa
El código de RecycleBot fue escrito por Ankit Vora en C en Arduino IDE, utilizando las bibliotecas de teclado, LCD y motor paso a paso. Para replicar el código de RecycleBot en un Arduino Mega, primero, todas las bibliotecas deben copiarse en el destino correcto de la carpeta Arduino, de modo que el compilador Arduino pueda compilarlas junto con el código del programa. En la plataforma de desarrollo Arduino, la biblioteca LCD ya está incluida; sin embargo, es necesario registrar el teclado y la biblioteca de motores paso a paso antes de compilar el código.
Pasos para replicar, compilar y cargar el código del programa en Arduino Mega
- Descargue las bibliotecas, descomprímalas y copie cada carpeta exactamente en la carpeta: arduino-1.0\libraries\
(Si está utilizando una nueva versión de Arduino, copie todas las bibliotecas a esa carpeta; en cualquier caso, la carpeta de la plataforma de desarrollo Arduino tendrá la carpeta 'bibliotecas' y todas y cada una de las bibliotecas utilizadas deben copiarse en esta carpeta.
- Ejecute la plataforma de desarrollo Arduino, vaya a la pestaña 'sketch', luego vaya a la sección 'importar biblioteca...' uno debería encontrar el teclado y el AFMotor en la lista. Si aparecen, significa que ya estamos listos para usar el código.
- Descargue el código para RecycleBot y spooler. Copie el código de RecycleBot en Arduino IDE o simplemente abra el archivo con Arduino y luego seleccione Arduino Mega de la lista de placas y cárguelo. El código de RecycleBot ahora está listo para ser ejecutado. Para el spooler, copie el código del archivo o abra el archivo para el código del spooler con Arduino, seleccione el Arduino Uno como placa y cárguelo, el spooler estará listo para funcionar.
Enlace de código de programa [1]
Si no puede encontrar los archivos o el enlace roto, envíeme un correo electrónico a avora#mtu.edu (reemplace # con @, antispam)
Circuito RecycleBot
Descargue el diagrama del circuito y fabrique en dos PCB separados para obtener una mayor confiabilidad. Se puede usar una placa de pruebas, pero el uso de placas de prueba a veces crea problemas de confiabilidad debido a que los cables cuelgan, y especialmente cuando usamos elementos de control de alta potencia con componentes de monitoreo y control de CC de baja potencia, es mejor y se recomienda hacer el circuito en PCB de uso general para una rápida creación de prototipos. Se recomienda realizar el sensor de temperatura y el circuito de medición en una PCB y el motor de CC y el controlador del calentador en otra PCB. El circuito para el sensor de temperatura es pequeño y funciona con un voltaje bajo de +5 V y necesita un buen aislamiento para los componentes de CA y debe fabricarse en una PCB separada como se muestra en la galería de imágenes. Y el circuito para el control del motor de CC y el controlador del calentador utiliza +5 V, +12 V y 110 V de CA, por lo que debe estar bien aislado de los componentes de CC de bajo voltaje como Arduino, etc., para que los transitorios y los picos no afecten el funcionamiento. de control de temperatura y proceso, por lo que también debe fabricarse en una PCB separada. Utilice alambre de cobre de buena calidad para el controlador de potencia del calentador, de modo que pueda soportar alta potencia y temperatura.
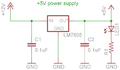
Circuito para fuente de alimentación

Sensor de temperatura basado en termopar

Sistema de control basado en Arduino Mega 2560

Controlador de calentador y motor
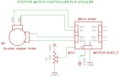
Controlador de cola de impresión





Cómo funciona el circuito
RecycleBot v.2.3 es un sistema de control de procesos totalmente automatizado con una interfaz de entrada/salida fácil de operar.
Los componentes de entrada constituyen
- Teclado
- Sensor de temperatura
Los componentes de salida constituyen
- LCD
- Controlador de motor MOSFET
- control triac
- Cola de impresión
Lo primero que hace Arduino cuando se enciende es mostrar un mensaje de bienvenida. Después de eso, entra en un bucle while y permanece allí mientras el usuario no introduzca una opción válida de '1' o '2' desde el teclado. La elección de '1' en el teclado hará que el programa verifique la declaración de condición para '1' siendo igual a seleccionar el plástico y de manera similar, la elección de '2' en el teclado hará que el programa verifique la declaración de condición para ' siendo 2' igual a alimentar la temperatura. En cualquiera de los casos anteriores, el programa avanza rompiendo el ciclo y pasa al siguiente ciclo de acuerdo con la elección realizada anteriormente.
Si el usuario ingresó '1', volverá a ir a un bucle while y permanecerá allí hasta que el usuario no elija entre 0 y 9 para una selección de plástico. Después de seleccionar el plástico, el programa muestra el tipo de plástico y la temperatura establecida y le pide al usuario que confirme presionando la tecla '#', que se verifica mediante una declaración condicional if else. Si se determina que la condición es verdadera, el bucle while se rompe y entra en el bucle de control del proceso y permanece allí hasta el final.
De manera similar, para la opción '2', los programas entran en un bucle while y permanecen allí hasta que se introduce una entrada válida y en este caso es una temperatura inferior a 350 o C. Si el usuario presiona '*', la entrada de temperatura anterior se borra de la variable y se toma una nueva entrada de temperatura siempre que sea inferior a 350 o C. Después de eso, el programa pasa al modo de verificación de condición y espera al usuario hasta que confirme la temperatura presionando la tecla '#'. Tan pronto como se presiona la tecla '#', el bucle se rompe y el programa ingresa al bucle de control de proceso y permanece allí hasta el final hasta que alguien presiona el botón de reinicio principal en la placa Arduino.
En el bucle de control de procesos, el programa permanece en un bucle monitoreando continuamente la temperatura, que es alimentada por el AD 595 (amplificador de termopar) a la entrada ADC de Arduino. Arduino convierte ese valor analógico en el equivalente digital y luego se convierte a escala Celsius mediante la multiplicación adecuada de un factor. Después de leer la temperatura, Arduino entra en el modo de comparación de declaraciones condicionales y compara varias condiciones de funcionamiento explicadas en la sección siguiente y, en base a eso, controla la potencia del calentador. El modo PWM parcial se utiliza para controlar la potencia del calentador; sin embargo, el Arduino solo controla el encendido/apagado del motor de CC y el regulador lineal controla la velocidad del motor y su valor varía según la resistencia del potenciómetro, que se controla manualmente. . Al cambiar el valor del potenciómetro, el voltaje de salida cambia y también cambia la potencia correspondiente al motor de CC. El spooler es un simple controlador de motor paso a paso de velocidad variable, que está controlado por otra placa Arduino y está sincronizado con Arduino Mega, que aloja el control del proceso RecycleBot. Siempre que el motor de alimentación de CC está encendido/apagado, el motor paso a paso también funciona igual, con la diferencia de que está controlado por un Arduino diferente. Este paso en el control del proceso se repite infinitamente y está programado para mantener la temperatura del barril dentro del rango de temperatura establecido que es 15 o C por encima y por debajo de los valores establecidos. A veces puede suceder que la temperatura del sistema exceda la temperatura establecida, pero en ese caso el programa se ajustará solo de tal manera que la temperatura del barril descenderá dentro del rango en un corto período dependiendo de las condiciones de operación.
Cómo ensamblar (componentes eléctricos)
Conecte las PCB siguiendo los diagramas de circuitos de la última sección.
Una vez completado el circuito, es necesario alojarlo (especialmente el controlador del motor de CC y el control de alimentación de CA) para mayor seguridad. Una solución de bajo costo que se utilizó en nuestro prototipo fue una fuente de alimentación ATX SMPS de computadora desechada.
- Primero desmonte la fuente de alimentación y retire la PCB de la fuente de alimentación del interior.
- Ahora taladre 4 orificios en la PCB de control del calentador si aún no los tiene para el montaje, y también taladre 4 en el lado inferior de la carcasa metálica de la fuente de alimentación ATX alineándolos correctamente con los orificios de montaje en la PCB.
- Luego monte la PCB en el gabinete, conecte el extractor de aire de la fuente de alimentación SMPS con el conector que se encuentra en la PCB para el ventilador o simplemente conecte los cables con la polaridad correcta al conector de alimentación de +12 V proporcionado. El ventilador de escape ayuda a enfriar el MOSFET y el regulador de voltaje lineal y a mantener la temperatura por debajo del rango de temperatura operable.
- Luego taladre un orificio en la superficie superior del gabinete para insertar y montar el potenciómetro para el controlador de velocidad del motor de CC.
- Monte el Triac como se muestra en la galería de imágenes a continuación.
- Saque los cables de entrada y salida de la abertura circular en la fuente de alimentación ATX y conéctelos a sus respectivos elementos como calentador, motor, toma de corriente CA, etc.
- El termopar debe colocarse entre la brida del cilindro del calentador y la matriz de extrusión cubriéndolo completamente con cinta kapton de modo que quede completamente aislado de los vapores de fondo y el ruido eléctrico, como se muestra en la figura siguiente.
Una vez ensamblado el circuito, es hora de probar si todo funciona según lo diseñado y previsto. El mecanismo de carrete se colocará sobre el motor paso a paso para hacer un carrete de plástico extruido.

Fuente de alimentación ATX desechada, PCB SMPS retirada y base aislada con cinta Kapton.

La PCB controladora del calentador y del motor está montada en el gabinete. El ventilador de extracción está conectado al suministro.

Se completa el montaje final, con el potenciómetro en la parte superior para controlar la velocidad del motor.

Montaje final con conexiones y contactos eléctricos.

Montaje final con conexiones y contactos eléctricos.

Mecanismo de cola simple.







Conjunto final completo listo para ser probado en campana limpia.
Detalles sobre aislamiento
Cómo ensamblar (componentes mecánicos)
Las instrucciones de montaje mecánico y los dibujos de las piezas se pueden encontrar en el enlace que figura a continuación. Cabe señalar que en la evolución de varias versiones de RecycleBots en MOST , las partes mecánicas subyacentes son las mismas, mientras que las partes eléctricas se actualizan continuamente para un mejor rendimiento.
Cómo probar
El RecycleBot es fácil de probar y usar. Una vez que esté completamente ensamblado, conecte el enchufe a la toma de corriente de CA y debería aparecer un mensaje de bienvenida en la pantalla LCD, el LED de encendido tanto en la placa del sensor de temperatura como en la placa Arduino Mega debería iluminarse indicando energía en el circuito. Después del mensaje de bienvenida, se le pedirá que seleccione el plástico para extrusión o introduzca la temperatura de extrusión. Después de seleccionar la temperatura de extrusión, encontrará la pantalla LCD que muestra la temperatura del sistema y la temperatura establecida. TheRecycleBot debe seguir la lógica que se menciona a continuación.
- Si la temperatura del sistema está por debajo de la temperatura establecida: 15 o C, la extrusión no comenzará y el calentador funcionará a máxima potencia.
- Si la temperatura del sistema está por encima de la temperatura establecida: 15 o C, pero por debajo de la temperatura establecida, entonces la extrusión continuará y el calentador se encenderá con la potencia de entrada reducida para controlar la temperatura en el rango límite. Spooler también comienza con el motor.
- Si la temperatura del sistema está por encima de la temperatura establecida pero por debajo de la temperatura establecida + 15 o C, entonces la extrusión continuará y el calentador se encenderá con la potencia de entrada aún más reducida y controlada para mantener la temperatura en el rango establecido. La bobina continúa enrollando el filamento mientras el motor esté girando.
- Si la temperatura del sistema está por encima de la temperatura establecida + 15 o C, entonces la extrusión continuará y el calentador se apagará por completo para mantener la temperatura dentro del rango establecido. La bobina continúa enrollando el filamento mientras el motor esté girando.
Si RecycleBot funciona de manera diferente al algoritmo mencionado anteriormente, entonces es necesario solucionar el problema. En general, es muy poco probable que el código no funcione según el algoritmo mencionado anteriormente, ya que ha sido suficientemente probado. Las principales fuentes de posibles errores pueden ser un sensor de temperatura defectuoso, una lectura de temperatura incorrecta y conexiones sueltas, especialmente al controlador de potencia del calentador y al controlador del motor de CC.

El LED de encendido se enciende cuando el circuito está encendido.

La pantalla de bienvenida 1 aparece después de encender la pantalla.

La pantalla de colaboradores aparece después de la pantalla de bienvenida.

Aparece la pantalla de la primera opción y el usuario debe ingresar 1 o 2.

Esta pantalla de opción aparece cuando el usuario presiona 1 en la opción anterior, el usuario debe presionar cualquier tecla entre 0 y 9 según el tipo de plástico.

Después de que el usuario selecciona el tipo de plástico, debe confirmar la selección presionando '#'.

Después de confirmar la selección, comienza el proceso.

La temperatura del sistema aumenta rápidamente tan pronto como comienza el proceso.

La temperatura del sistema aumenta aún más rápidamente tan pronto como comienza el proceso.

La temperatura del sistema alcanza el rango de temperatura de extrusión y la extrusión comienza.

El motor de alimentación de CC arranca tan pronto como la temperatura del sistema alcanza el rango de temperatura de extrusión.

La cola de impresión se inicia tan pronto como la temperatura del sistema alcanza el rango de temperatura de extrusión.

Plástico triturado utilizado para reciclaje y extrusión.

Esta pantalla de opción aparece cuando el usuario presiona 2 por primera vez para ingresar manualmente la temperatura de extrusión.

El usuario ingresa la temperatura.

Arduino solicita al usuario que confirme la temperatura de extrusión.

El usuario ingresa una temperatura superior a la temperatura máxima.

Arduino da un error de "desbordamiento" para la temperatura ingresada que es superior a la temperatura máxima.
Aparece la pantalla de la primera opción y el usuario debe ingresar 1 o 2.

Cuando el filamento sale del troquel, ahora está listo para ser enrollado.



















Cómo utilizar
Pasos para utilizar el RecycleBot
- Tan pronto como la energía fluye hacia el circuito, se muestra un mensaje de bienvenida y el controlador solicita al usuario que ingrese una opción para seleccionar el tipo de plástico para extrusión o para alimentar la temperatura. Si desea seleccionar el plástico, ingrese 1 o si desea introducir la temperatura, presione 2 en el teclado.
- Si desea seleccionar un plástico, entonces tiene 10 opciones de varios plásticos, simplemente presione 0~9 según la elección del plástico y RecycleBot cargará automáticamente la temperatura de extrusión. Una vez realizada la elección, el Arduino le pedirá que confirme la temperatura, en ese momento presione '#' en el teclado y comenzará el proceso.
- Si desea ingresar la temperatura para extrusión, ingrésela desde el teclado; debe asegurarse de que esté por debajo de 350 o C; de lo contrario, no aceptará y aparecerá un mensaje de desbordamiento y se le pedirá nuevamente al usuario que ingrese la temperatura. . Si en algún momento desea borrar la temperatura ingresada, simplemente presione el botón '*' y podrá ingresar nuevamente la temperatura. Si la temperatura de entrada es inferior a 100 o C, agregue también un '0' antes del número. Arduino solo aceptará la temperatura en tres dígitos, es decir, si desea ingresar 50 o C, entonces deberá ingresar 050. Nuevamente, después de introducir la temperatura, Arduino le pedirá que confirme la temperatura, en ese momento presione '# ' desde el teclado y se iniciará el proceso.
- Ahora tienes que esperar hasta que el filamento salga del troquel, cuando salga, toma un alicate de punta, tira suavemente de él lentamente y colócalo sobre la bobina. La velocidad del carrete se puede ajustar mediante el potenciómetro previsto para ello. El grosor del filamento se puede ajustar según la temperatura y la velocidad del carrete.



Solución de problemas
Limpieza y cuidado del termopar
La medición precisa de la temperatura es el parámetro de control de entrada más importante para todo el proceso. Se ha descubierto que debido a la vaporización de los polímeros y la acción capilar durante la extrusión, el polímero se adhiere al termopar (en la cinta Kapton) y afecta la medición precisa de la temperatura. Este problema se puede resolver fácilmente desmantelando y abriendo el troquel de extrusión frontal y luego quitando el termopar. Ahora el termopar se puede limpiar fácilmente con una hoja de afeitar después de quitar la pequeña cinta Kapton colocada sobre él. Después de limpiarlo, vuelva a colocar una pequeña tira de cinta Kapton sobre la cubierta del termopar y aísle todo el termopar y luego colóquela entre la brida del cilindro y la matriz de extrusión como antes. Esta acción de limpieza y cuidado del termopar debe realizarse con regularidad para garantizar la misma calidad del filamento.
Desmontaje de la sección de calefacción y del sinfín.
A veces es necesario desmontar el calentador y también sacar el sinfín para limpiarlo. Esto no es fácil, especialmente cuando queda algo de polímero que se ha solidificado y ha bloqueado la barrena en el barril de calentamiento. En esta situación, se recomienda utilizar calentadores de banda que están disponibles a bajo precio y pueden usarse de manera muy eficiente para fundir y vaporizar el polímero sobrante. Los calentadores de banda tienen una densidad de temperatura muy alta y pueden vaporizar fácilmente el polímero. Cualquier calentador de banda que tenga un diámetro superior a una pulgada y una potencia de calentamiento superior a 500 W debería ser lo suficientemente bueno para resolver el propósito. Simplemente coloque y mueva lentamente el calentador de banda a lo largo del eje del barril de manera que caliente el barril y el tubo de alimentación. En poco tiempo, vaporizará el polímero. Después de que se vaporice todo el polímero sobrante, deje que el barril se enfríe a temperatura ambiente y luego se podrá desmontar el sistema y sacar la barrena fácilmente.
¿Qué hacer cuando la barrena se atasca después de la extrusión?
Es muy probable que después del final del proceso de extrusión (cuando se apaga el RecycleBot), queden algunos chips de polímero dentro del sinfín y la sección de calentamiento de la tubería, que se habrán solidificado cuando alcance la temperatura ambiente. En tal situación, cuando se vuelve a operar el RecyclebBot, es posible que el sinfín no gire y empuje el plástico triturado dentro de la tolva hacia la sección de calentamiento, entonces, ¿qué hacer? En tal situación, esto se puede hacer de acuerdo con los casos mencionados a continuación:
- Caso 1: Si el siguiente ciclo de extrusión usa el mismo polímero: en este caso, el polímero anterior se derretirá automáticamente a la temperatura establecida y el sinfín comenzará a girar sobre sí mismo tan pronto como la temperatura dentro de la sección de calentamiento alcance la temperatura de fusión del polímero existente.
- Caso 2: Si el siguiente ciclo de extrusión utiliza un polímero diferente con una temperatura de fusión más alta. En este caso, el polímero anterior se derretirá cuando la temperatura dentro de la sección de calentamiento alcance la temperatura de fusión del polímero residente y el sinfín también comenzará a girar sobre sí mismo, sin embargo , es necesario eliminar el polímero anterior antes de extruir y enrollar el polímero actual sobre un carrete. Esto se puede hacer agregando algunos trozos triturados del polímero actualmente usado, esto empujará el polímero anterior fuera de la extrusora, pero también tendrá polímero actual, por lo que algunos trozos triturados se desperdiciarán para eliminar el polímero anterior. Después de una extrusión suficiente de los polímeros mixtos, lo que se puede juzgar basándose en la observación del filamento, se puede cortar y se puede usar un filamento nuevo para enrollar cuando el filamento está relativamente libre de impurezas del polímero anterior.
- Caso 3: Si el siguiente ciclo de extrusión utiliza un polímero diferente con una temperatura de fusión más baja. En este caso, se puede repetir el procedimiento del caso 2; sin embargo, si el polímero anterior no sale bien, la temperatura de extrusión se puede ajustar a una temperatura máxima. y se pueden agregar virutas trituradas de polímero actualmente utilizadas para forzar la salida del polímero anterior o se puede abrir la sección de calentamiento y limpiar con una lima redonda. Después de esto, ensamble la sección de calentamiento y opere el RecycleBot a la temperatura más alta sin ninguna alimentación de polímero, esto derretirá y vaporizará el polímero anterior.
Trabajo futuro: mejorar esto
Utilice menos componentes - Reduzca la complejidad - Reduzca los costos
- Hazlo más pequeño: el lado mecánico está sobredimensionado; la base es en gran medida innecesaria
- Una mejora importante implica cortar el segundo microcontrolador del spooler. La cola de impresión está controlada por otro Arduino (Uno), no por el Arduino Mega. Ambas bibliotecas, es decir, Arduino Motor Shield y LCD o teclado, utilizan algunos de los mismos "registros de temporizador" que son responsables de generar ciclos de sincronización precisos para varios procesos y comandos, por lo que cuando usamos ambas bibliotecas simultáneamente, falla después. corriendo durante unos segundos. Nos quedan muchos pines en Mega. Lo que podemos hacer o podríamos haber hecho es generar el ciclo de sincronización mediante el propio Arduino Mega y luego controlar el motor paso a paso con eso. Esta sería una forma más económica de construirlo, pero necesitamos dos chips más y cuatro transistores de potencia, así que optamos por la opción rápida en lugar de volver a diseñar y escribir un código para una nueva incorporación.
Algunas referencias útiles y enlaces externos.
- Sensor termopar para reprap
- Tutorial del teclado Arduino
- Escudo del motor Arduino
- Extrusora de residuos de plástico (consulte la sección de referencias y enlaces externos)
- Robot de reciclaje muy simple
- Extrusora de residuos de plástico Revisión de la literatura.
- Power Jack Motion: Soluciones profesionales de control de movimiento
Ver también
- robot de reciclaje
- Recyclebot en RepRap wiki
- Ensayos mecánicos de componentes poliméricos fabricados con la impresora 3D RepRap
- Desarrollo y viabilidad de aplicaciones para la impresora 3-D RepRap.
- Análisis del ciclo de vida del reciclaje distribuido de polímeros.
- Fabricación personalizada distribuida con energía solar