
Fig 1 : Circuit générateur de fil
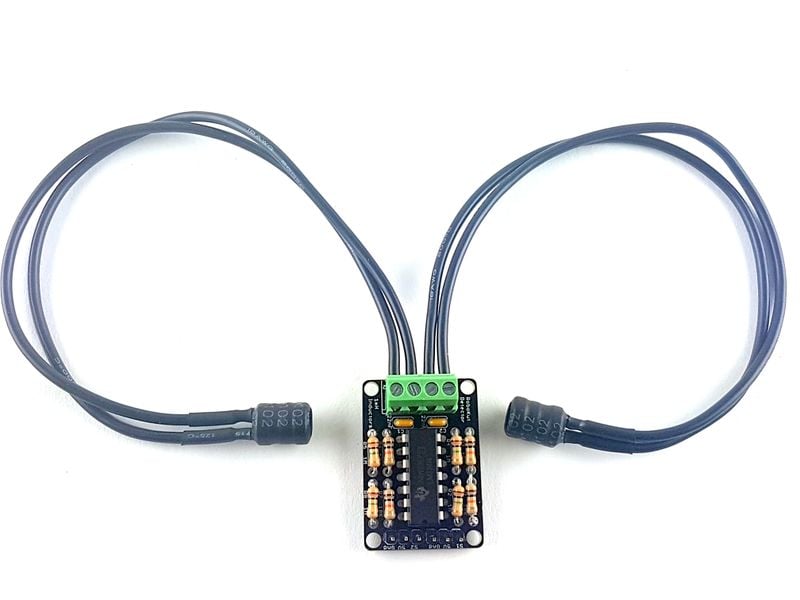
Figure 2 : Circuit du capteur


Contenu
Introduction
Il s'agit du système de suivi de fil pour OSHE Growbot . Il se compose de deux circuits, un circuit générateur de fil périphérique et un circuit de capteur LC. Le générateur de câble périphérique induira une fréquence comprise entre 32 et 43 Hz sur un câble périphérique. Ce câble périphérique est constitué de 100 pieds de fil de calibre 22, disposé dans le chemin que le Growbot empruntera dans le jardin. Le LC possède deux inductances capables de détecter le signal traversant le câble périphérique. Il y aura un inducteur de chaque côté du fil, détectant quand il se rapproche. Étant donné que les Raspberry Pi n'ont pas d'entrée analogique, un ADC doit être utilisé. Toutes les fournitures et le code peuvent être trouvés ci-dessous. Le circuit générateur de fil périphérique sera situé dans l’unité d’habitation Growbot. Le circuit du capteur sera sur le Growbot. Ce système fonctionne avec les moteurs Odrive pour contrôler le Growbot.
Pour les détails de ces circuits : [ Robot Shop ]
Fichiers et nomenclatures
Fichier pour les impressions 3D disponible sur [ <ajouter un lien> OSF] Fichiers pour le code python du Raspberry Pi disponibles sur Github .
Voici également :
- Kit : RobotShop
- Fichiers PCB : Télécharger
Schémas


- ---
Figure 1 (à gauche) : Schéma du générateur de fil Figure 2 (à droite) : Schéma du capteur
Fournitures supplémentaires
Outillages et consommables en plus de ceux listés dans la nomenclature.
Outils
- Fer à souder
- Pince à dénuder et coupe-fil
- Imprimante 3D
Consommables
- Souder
- Attaches zippées
- super colle
- Câble 20AWG pour inducteurs
- 100' de fil multibrins de calibre 22 pour le périmètre
Avant que tu commences
Passez en revue le processus ci-dessous et rassemblez tous les outils et consommables dont vous avez besoin pour commencer la construction. La liste des outils ci-dessus n'est pas nécessairement exhaustive. L'assemblage et le câblage sont les étapes après avoir soudé les composants au PCB et imprimé les EndsAndPins et DEUX WireHolder .
Logiciel à télécharger et à installer
- Raspberry Pi a besoin de Python3-pip : [ RaspPi ]
- Activer I2C sur Raspberry Pi : [ Adafruit ]
- Configuration du Raspberry Pi vers l'ADC : [ Adafruit ]
Assemblage et câblage
Mécanique
- ---
- Fixez BotEnd à l'extrusion d'aluminium avec une vis ??m et ??.
- Placez le WireHolder dans BotEnd et fixez-le avec une goupille ou une vis et un boulon ??m
- Placez SensorEnd dans WireHolder et fixez-le avec une goupille ou une vis et un boulon ??m
- Mettez l'inducteur dans la fente du SensorEnd, avec un peu de superglue
- Attachez le fil dans les petites fentes du WireHolder
Câblage

- ---
- Raspberry Pi vers ADS illustré ci-dessus
- Les sorties analogiques du circuit de capteur vont à A0 et A1 sur l'ADS
- Le circuit du capteur nécessite une source d'alimentation de 5 V
- Le circuit générateur de fil périphérique nécessite une source d’alimentation de 12 V
Essai
- Les tests initiaux des capteurs utilisent autoTest.py
- Collectez les valeurs Min et Max et remplacez-les à l'emplacement approprié dans autoTest.py
- Les moteurs Odrive sont prêts à tester
Remarques
- Assurez-vous que les fils de votre capteur inductif sont suffisamment longs avant de couper
- Testez le code avant de coller les inducteurs ou d'attacher le fil
- Des procédures supplémentaires peuvent être trouvées ici .
| Description | Compter |
|---|---|
| PCB générateur | 1 |
| Carte de capteur | 1 |
| CAN ADS1115 | 1 |
| Résistance 3,3 kΩ | 1 |
| Résistance 12 kΩ | 1 |
| Résistance 47 Ω | 1 |
| Résistance 10 kΩ | 4 |
| Résistance 1 MΩ | 4 |
| Potentiomètre 4,7 kΩ | 1 |
| Résistance 12 kΩ | 1 |
| Condensateur 100 nF | 2 |
| Condensateur 1,2 nF | 1 |
| Condensateur 1 uF | 1 |
| Condensateur 22 nF | 2 |
| Inducteur de 1 mH | 2 |
| Amplificateur LM324N | 1 |
| Minuterie NE555 | 1 |
| Connecteur cylindrique 2,1x5,5 mm | 1 |
| Connecteur borne 2 positions | 3 |
| Embase à broche à angle droit 3 positions | 2 |
| Câble ~1 mètre 20AWG (pour les inducteurs) | 1 |
| ~ Fil multibrins de calibre 22 de 100' (pour le fil suivant) | 1 |
| Auteurs | Erica Umlor |
|---|---|
| Licence | CC-BY-SA-4.0 |
| Langue | anglais (fr) |
| Quels liens ici | Système de suivi de fil robotisé , utilisateur : Ejumlor , discussion utilisateur : Ejumlor |
| Traductions | italien |
| Impact | 500 |
| Créé | 26 avril 2020 par Zach Arnold |
| Modifié | 19 mars 2022 par Irene Delgado |
| Citer comme | Erica Umlor (2020-2022). "Système de suivi de fil" . Appropédie . Récupéré le 15 novembre 2023 . |
| Requêtes API | basique , sémantique , html , fichiers , plus |