
Abb. 1: Drahtgeneratorschaltung
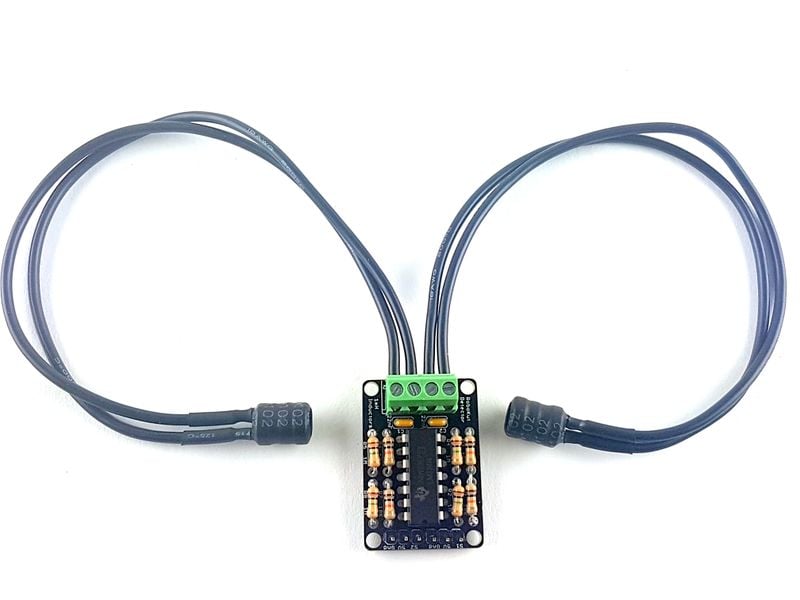
Abb. 2: Sensorschaltung


Inhalt
Einführung
Dies ist das Drahtverfolgungssystem für OSHE Growbot . Es besteht aus zwei Kreisen, einem Begrenzungsdraht-Generatorkreis und einem LC-Sensorkreis. Der Begrenzungsdrahtgenerator induziert eine Frequenz zwischen 32 und 43 Hz auf einem Begrenzungsdraht. Bei diesem Begrenzungsdraht handelt es sich um 100 Fuß (22 Gauge) Draht, der entlang des Weges verlegt wird, den der Growbot durch den Garten nimmt. Der LC verfügt über zwei Induktivitäten, die das durch den Begrenzungsdraht fließende Signal erkennen können. Auf beiden Seiten des Kabels befindet sich ein Induktor, der erkennt, wann er sich nähert. Da Raspberry Pis keinen analogen Eingang haben, muss ein ADC verwendet werden. Alle Materialien und Codes finden Sie unten. Der Stromkreis des Begrenzungsdrahtgenerators befindet sich in der Growbot-Gehäuseeinheit. Der Sensorschaltkreis befindet sich am Growbot. Dieses System arbeitet mit den Odrive-Motoren zusammen, um den Growbot zu steuern.
Einzelheiten zu diesen Schaltkreisen: [ Robot Shop ]
Dateien und Stücklisten
Datei für 3D-Drucke verfügbar unter [ <add link> OSF] Dateien für Raspberry Pi-Python-Code verfügbar unter Github .
Hier ist auch:
- Bausatz: RobotShop
- PCB-Dateien: Herunterladen
Schema


- ---
Abbildung 1 (links): Schema des Drahtgenerators. Abbildung 2 (rechts): Schema des Sensors
Zusätzliche Vorräte
Werkzeuge und Verbrauchsmaterialien zusätzlich zu den in der Stückliste aufgeführten.
Werkzeuge
- Lötkolben
- Abisolierer und Schneider
- 3D Drucker
Verbrauchsmaterial
- Lot
- Kabelbinder
- Sekundenkleber
- 20AWG-Kabel für Induktoren
- 100 Fuß mehradriger Draht der Stärke 22 für den Umfang
Bevor Sie beginnen
Sehen Sie sich den folgenden Prozess an und stellen Sie alle Werkzeuge und Verbrauchsmaterialien bereit, die Sie für den Baubeginn benötigen. Die obige Liste der Tools ist nicht unbedingt vollständig. Montage und Verkabelung sind die Schritte, nachdem Sie die Komponenten auf die Leiterplatte gelötet und EndsAndPins und TWO WireHolder gedruckt haben .
Software zum Herunterladen und Installieren
- Raspberry Pi benötigt Python3-pip: [ RaspPi ]
- I2C auf Raspberry Pi aktivieren: [ Adafruit ]
- Raspberry Pi zu ADC einrichten: [ Adafruit ]
Montage und Verkabelung
Mechanik
- ---
- Befestigen Sie BotEnd mit einer ??m-Schraube am Aluminiumprofil und ??.
- Platzieren Sie den WireHolder im BotEnd und sichern Sie ihn mit einem Stift oder einer ??m-Schraube und einem Bolzen
- Platzieren Sie das Sensorende im WireHolder und sichern Sie es mit einem Stift oder einer ??m-Schraube und einem Bolzen
- Setzen Sie den Induktor mit einem Klecks Sekundenkleber in den Schlitz des SensorEnd ein
- Binden Sie den Draht mit einem Kabelbinder in die kleinen Schlitze am WireHolder
Verdrahtung

- ---
- Raspberry Pi zu ADS wie oben gezeigt
- Analogausgänge vom Sensorschaltkreis gehen an A0 und A1 am ADS
- Der Sensorkreis benötigt eine 5-V-Stromquelle
- Der Stromkreis des Begrenzungsdrahtgenerators benötigt eine 12-V-Stromquelle
Testen
- Erste Tests von Sensoren verwenden autoTest.py
- Erfassen Sie Min- und Max-Werte und ersetzen Sie sie an der entsprechenden Stelle in autoTest.py
- Odrive-Motoren stehen zum Testen bereit
Anmerkungen
- Stellen Sie vor dem Schneiden sicher, dass die Kabel des Induktorsensors lang genug sind
- Testen Sie den Code, bevor Sie die Induktoren verkleben oder den Draht mit einem Kabelbinder verbinden
- Weitere Verfahren finden Sie hier .
| Beschreibung | Zählen |
|---|---|
| Generatorplatine | 1 |
| Sensorplatine | 1 |
| ADS1115 ADC | 1 |
| 3,3 kΩ Widerstand | 1 |
| 12 kΩ Widerstand | 1 |
| 47 Ω Widerstand | 1 |
| 10 kΩ Widerstand | 4 |
| 1 MΩ Widerstand | 4 |
| 4,7 kΩ Potentiometer | 1 |
| 12 kΩ Widerstand | 1 |
| 100 nF Kondensator | 2 |
| 1,2 nF Kondensator | 1 |
| 1 uF Kondensator | 1 |
| 22 nF Kondensator | 2 |
| 1 mH Induktor | 2 |
| LM324N Verstärker | 1 |
| NE555 Timer | 1 |
| 2,1 x 5,5 mm Hohlstecker | 1 |
| 2-poliger Anschlussstecker | 3 |
| 3 Positionen rechtwinkliger Stiftleiste | 2 |
| ~1 Meter 20AWG-Kabel (für die Induktivitäten) | 1 |
| ~100' 22-Gauge-Mehrdrahtkabel (für das folgende Kabel) | 1 |
| Autoren | Erica Umlor |
|---|---|
| Lizenz | CC-BY-SA-4.0 |
| Sprache | Englisch (en) |
| Welche Links hier | Robot Wire Following System , Benutzer:Ejumlor , Benutzergespräch:Ejumlor |
| Übersetzungen | Italienisch |
| Auswirkungen | 500 |
| Erstellt | 26. April 2020 von Zach Arnold |
| Geändert | 19. März 2022 von Irene Delgado |
| Zitieren als | Erica Umlor (2020–2022). „Drahtfolgesystem“ . Appropädie . Abgerufen am 15. November 2023 . |
| API-Abfragen | Basic , Semantik , HTML , Dateien , mehr |