
A base para este projeto foi um componente de um projeto de equipe de um semestre na Michigan Tech para projetar, desenvolver e testar um robô de nossa própria imaginação. Nossa equipe decidiu criar um robô para fazer queijo grelhado, e para isso era necessária uma placa de circuito para controlar o robô.
O projeto elétrico da placa era simples em conceito - criar uma placa capaz de controlar 3 motores de passo separados e um dispositivo de aquecimento resistivo, enquanto recebia entrada humana, posições mecânicas e leituras térmicas (para permitir o controle de circuito fechado). Isso poderia ser realizado (e foi realizado) com bastante facilidade usando um microcontrolador com recursos de modulação por largura de pulso e algumas placas de fuga para controle de motor de passo.
Projeto
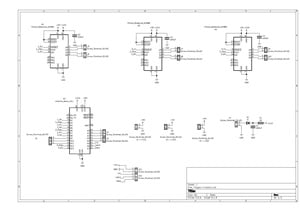
A foto acima é o esquema finalizado para a placa de controle do Sr. Flipper, dividido em partes que destacam de forma descritiva os requisitos de projeto. O design geral foi assim-- e Arduino Nano para o microcontrolador, pois são robustos o suficiente e fáceis de substituir. Conectado aos pinos PWM no Arduino Nano, existem 3 placas de driver de motor de passo Pololu A4988, que são conectadas à alimentação e alguns terminais de parafuso para conexão posterior aos motores. Além disso, conectado ao Nano via pinos PWM, há um conjunto de terminais de parafuso 3x1 destinado a ser os pontos de conexão para o dispositivo de aquecimento resistivo. Para garantir o controle em malha fechada, vários pontos de conexão foram feitos para serem posteriormente utilizados como sensores de posição baseados em potenciômetros para os motores de passo. Um circuito de fonte de alimentação está incluído para segurança e distribuição básicas. Finalmente, há um conjunto de cinco terminais de parafuso conectados a "Clk, Latch, Data, +5V, GND". Esta porta destina-se a ser um ponto de conexão para um controlador NES. O controle humano era uma especificação para o design, e os controladores do NES são bastante simplistas, então um controlador do NES foi escolhido como entrada de controle por conveniência e novidade.

O PCB roteado final para a placa de controle do Mr.Flipper é mostrado acima. Deve-se notar que esta placa foi explicitamente feita para ser de camada única para facilitar a criação/aquisição - todos os traços da camada superior retratados na prática foram substituídos por uma conexão de fio. Ter uma placa de camada única não era tecnicamente uma especificação de projeto exigida, mas foi escolhida para fabricar rapidamente a placa em casa, em vez de contratá-la.
Materiais e Custos
A lista de materiais apenas para esta placa (e o projeto de classe em geral) custou aproximadamente $ 63 dólares, mas levando em consideração apenas as peças utilizadas na placa, o custo cai para aproximadamente $ 15,30. Todo o robô exigiu despesas adicionais (ou seja, os componentes mecânicos e peças auxiliares fora do escopo da equipe elétrica). A BOM concluída está listada abaixo.

No total, esse projeto levou aproximadamente 20 a 25 horas para ser concluído, desde os primeiros conceitos até a soldagem.
Resultados Finais do Projeto

A foto acima é o resultado completo dos esforços da equipe - um robô automático para fazer queijo grelhado. A placa de circuito completa pode ser vista na parte inferior do dispositivo. Os 3 motores de passo controlam coletivamente o posicionamento XY da espátula e a rotação da espátula. O dispositivo pode pegar um queijo grelhado inacabado, erguê-lo no dispositivo de aquecimento resistivo (visto montado próximo ao topo do dispositivo), deixar o sanduíche até que esteja perfeitamente cozido e, em seguida, remover o sanduíche do dispositivo e apresentá-lo para ser comido .